打开手机扫一扫
欢迎继续阅读楼主其他信息
举报
原帖由 sklsy 于 2008-8-7 22:08 发表 哥们你太牛了,学什么的?
原帖由 c_nmusic 于 2008-8-8 09:15 发表 楼上也是高手啊!!! 以后遇到问题可要请教了!!
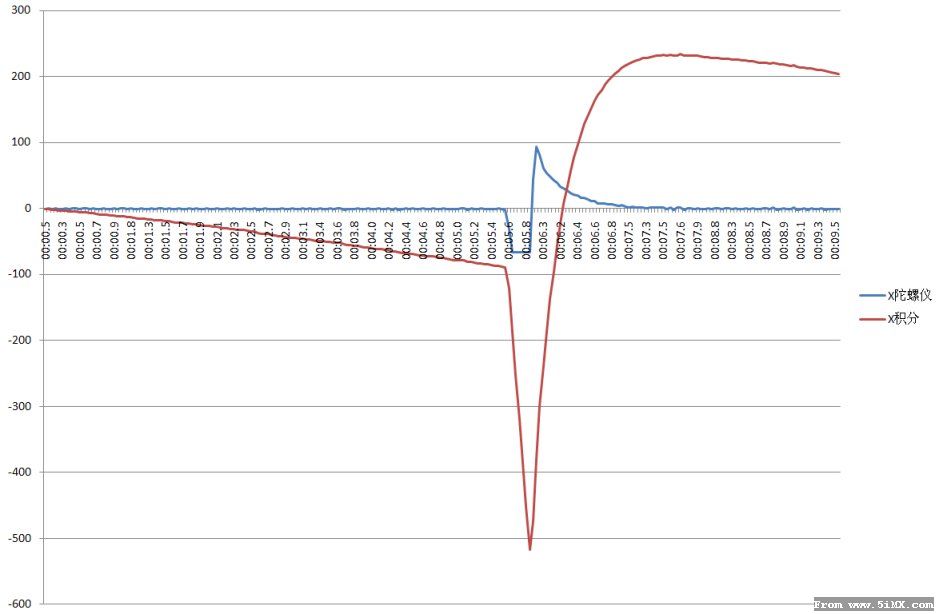
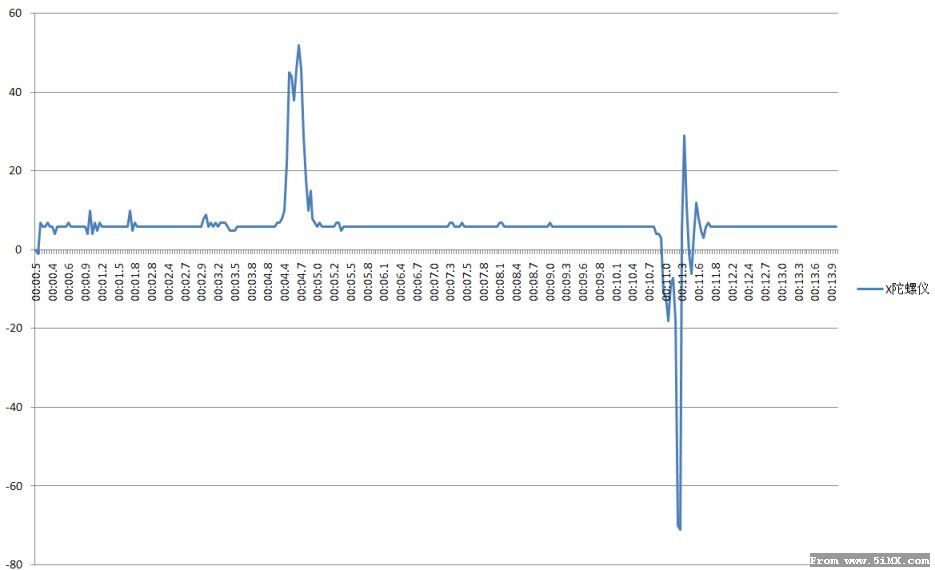
原帖由 johnfen 于 2008-8-8 09:16 发表 观察到ENC-03的输出波形不是很好,特别是加速旋转或旋转后急停时 ENC-03输出是摆动的,不知楼主注意到吗?
原帖由 c_nmusic 于 2008-8-8 09:41 发表 有没有试验过直接接在AD端口上?
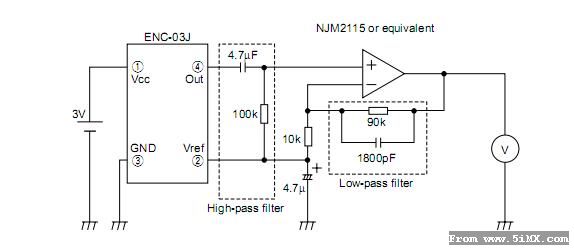
原帖由 johnfen 于 2008-8-8 09:48 发表 这到没有,这样也行?我看你的板子上有运放啊?
本版积分规则 发表回复 回帖后跳转到最后一页
查看 »



 /2
/2 


 楼主
楼主 发表于 2008-8-5 21:28
发表于 2008-8-5 21:28