|
|
micro 在 2004-12-24 08:47 AM 发表:
断电之后位置变化了谁能知道?难道每次上电都来个机械调零?
这个问题早想好了,相信大家对MCU掉电检测/中断一定了解吧
在每次舵机停止使用(掉电)瞬间(mS级),MCU因外部掉电检测电路动作而进入掉电中断程序
在掉电中断程序里将有个小任务:把当前舵臂位置信息写入EEPROM,M16里有上0.5K的EEPROM
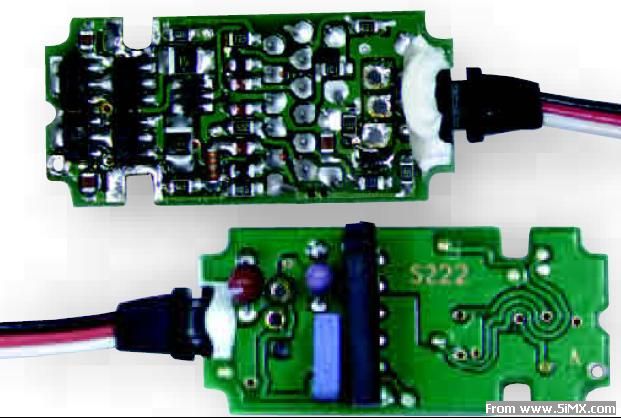
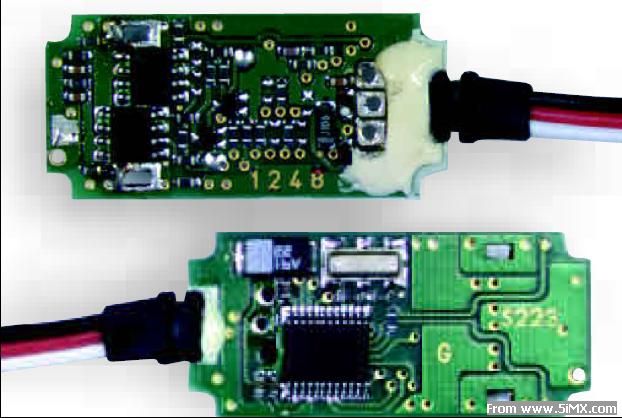
还有就是涡杆减速的一个特点,看前面的图,当电机不工作时(舵机)不用时,其舵臂是不可
能转的,下次使用舵机时,MCU读出EEPROM内的东西就是现在的舵臂位置!!!!!!!!!
在这里,有感电机与蜗杆减速是必不可少的,
还是一句老话:好处多多,就一个坏处--------贵
***************************************************************************
以上虽不算是什么技术但也是小弟几日苦思所得,望大家可实验自用,不要商用
[ Last edited by wangguanfu on 2004-12-24 at 19:57 ] |
|



 /2
/2 



 发表于 2004-12-23 16:14
发表于 2004-12-23 16:14

 收藏
收藏 楼主
楼主