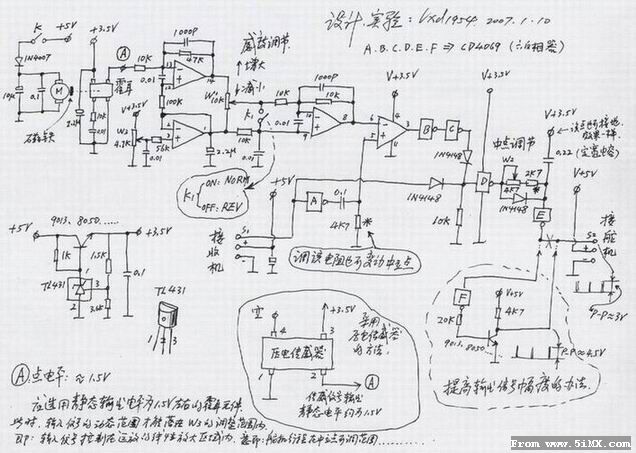
几点说明:(图中的运放采用LM324)
a. 这个电路比俺以前做的那个压电陀螺有所改进,增加了舵鸡正反向开关(K1),轻松实现舵鸡NORM\REV的转换。
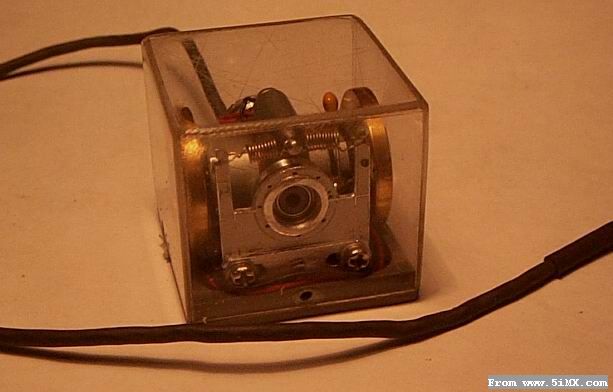
b. 霍尔元件的静态输出直流电平要求在1.5V,配合W3的调节,使其输入信号落在运放的线性区域内,
电路中标有*号的元件可能要做相应调整,W3的调节很重要,电路调好后的标准是:
调整感度W1时,舵鸡中点位置不变!K1断开或闭合时,舵鸡中立位置不变!
c. DIY该电路,需要一定的电路基础,特别是对运放器件的掌握与应用要熟练!否则......失败后别说俺的电路不行哦!
d. 某些舵鸡可能需要p-p值4V以上的输入信号,亦可参考图中虚线框内的办法来对付。
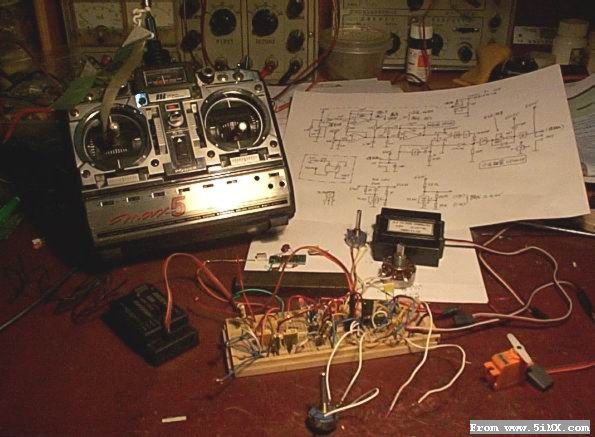
e. 该电路只完成了实验板上的实验,俺实在太忙,没时间做PCB板啦,对此有兴趣、有能力的模友可以接着玩下去。
f. 将霍尔元件从该电路的“A”点断开,接入PG-03一类的压电传感器,该电路就是一个压电陀螺仪啦! :em14:
g. 图中+3.5V稳压输出,可用现成的贴片式三端稳压器,俺手里没有,只好用TL431,不得已而为之哦!
h. 最后声明:该帖内容仅供解决发烧友手痒之问题,严禁用于任何商业之目的!否则...... 惹出麻烦,后果自负!



 /2
/2 



 发表于 2007-1-14 01:49
发表于 2007-1-14 01:49

















 收藏
收藏
