曾经炸过,也听过,也想过,为什么那么多炸机事故,能不能避免一下呢?
看着那一张张高额报价单,看着一起起扯得死去活来的售后纠纷,心疼各位爱机同胞那白花花的银子。所以花了点时间,讲讲自己对这些常见事故个人的一些见解,看看能不能帮大家尽量避免这种情况,讲的不好的地方,请大家指正批评,话不多说,我们进入正题:
一、首先要讲的,也是重中之重:环境问题 很多人不注意飞行环境,所以伤痕累累: 比如环境有风、有云雾、有强光、有磁场干扰、飞到障碍物后方导致返航失败、贴近水面飞行、穿桥飞行、姿态模式炸机,靠近建筑物飞行……
1、 风疯疯:
在飞行过程,地面的风速跟高空的风速是不一样的,所以不要总以为地面没有什么风就能安心飞,那你就想多了,建议大家学会使用App里面的姿态球功能:不打杆,飞机上天之后在没有风的情况下面这个半圆都是蓝色体,如果有风,那么姿态球中蓝色半圆将会出现左右偏或者前后倾,那么说明这个时候飞机是在抗风,这个时候如果姿态球倾斜幅度很大建议就不要飞太高太远,最好不飞;如果飞机已经被吹的往一边跑,建议在安全的高度范围内去适当下降高度,减小风力的影响,然后尝试把飞行器操控回家。如果飞机已经被吹得连图传画面都断了,建议同学你不要凌乱了,可以准备攒钱再买了。 2、 云雾: 很多小伙伴喜欢穿云飞飞机,确认,不可否认,你拍的画面很震撼,很带感,但是现在的飞机啊,功能是越来越niubility,装的传感器也越来越多,你飞机在飞行的时候,先不说你飞机在穿雾的时候会被雾水打湿(电子产品内部潮湿的隐患就像人一样你懂得),现在带视觉、超声波或者红外传感器这类飞机,有可能会检测云雾等物体,那么飞机在飞行或者返航过程中,就会出现误避障或者高度检测异常等情况,所以如果遇到环境确认有大雾等情况,听句劝,还是别飞啦…… 3、 强光影响:
上面说了,无人机越来越智能,越来越厉害,但也是靠一堆元器件组装起来的,用户手册提到,视觉避障系统容易受光照强度影响,相比人来时,目前技术还是有局限性,无人机里面的传感器可辨识能力还是无法与人作比较,所以在飞行路线上出现强光照射,那么这个时候飞行器就有可能受到影响,比如触发误避障,视觉认为前方出现了障碍物。这个时候如果飞行器是在返航过程那就尴尬了,飞机可能会避障上升,如果达到限制高度,那飞机还有可能避障悬停不动,直到低电量触发下降,哎……这样就又是一起飞丢事故……所以大家要谨记避免逆光飞行。 4、 磁场干扰:
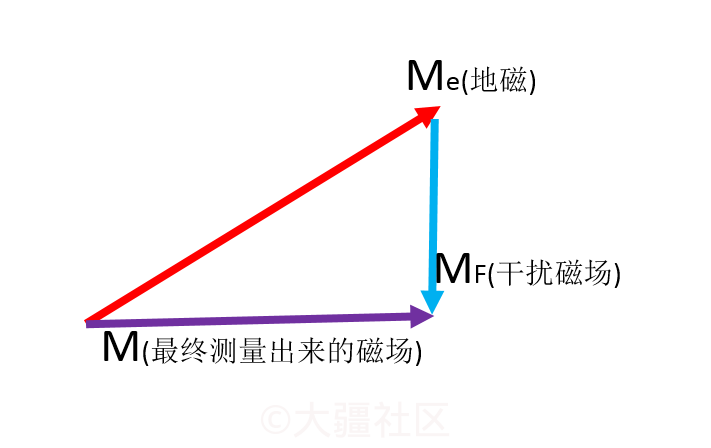
这个就厉害啦,说明书一直强调,远离信号干扰源,不要在高压电线塔或者高压电线,或者信号塔,建筑物,钢筋结构等环境附近飞行,这个很有原因的: 学过物理的同学应该都清楚,地球本身是一个大的磁场,飞机指南针工作就要靠这个磁场来辨别方向。但是呢,如果你到一个存在干扰磁场的环境飞行,比如上面提到的那些环境,那么这个时候你的飞机检测出来的磁场就是地磁以及这个干扰磁场的矢量加成(可以见下图),那么测量出来的磁场方向,嘿嘿嘿,你绝的可靠吗?嘿嘿嘿,当然不靠谱啦,那么这个时候飞机初始化之后的航向就错了,飞行器连自己的方向都搞错,还能愉快的玩耍吗? 另外,有些我们看不到的磁场,比如起飞地点下方磁场很强,起飞后如果App有提示磁场干扰,那么这个时候就要小心了,建议还是换个空旷环境再飞。 5、 将飞机飞到障碍物后方: 有些无人机有避障功能,但不要以为跟人一样带了套就万无一失,嘿嘿嘿,如果这样想那你就想多了。很多人觉得飞机有避障功能就可以为所欲为,那只能说,too young,too naïve,无人机的避障系统是有工作条件的,具体是什么条件不清楚的是时候好好补补说明书的知识了:https://www.dji.com/cn(每个产品点进去都有用户手册)。无人机也像人一样,识别物体也是有局限性,比如一到晚上也看不清,所以说无人机并不是无时无刻都能检测到障碍物然后进行避障的。在这种情况下,即使具备避障功能的无人机飞到障碍物后方,触发失控返航也避免不了炸机,就更不用说那些没有带避障功能的无人机了。所以要防止炸机,还要从自身做起,不要飞到障碍物后方,记住了。 6、贴近水面飞行:
其实很多同学都是为了满足一个装ABC的心理,因为水面上拍出来的画面很好看,是的,我的这么觉得的,但有细看说明书的同学应该有看到飞行环境要求中提到,不要在水面飞行这些字眼,为什么不行也是有原因的:飞机测高里面一个很重要的传感器:气压计,因为水面气压不稳定,所以会严重影响到飞机气压计高度的测量,这个时候飞机高度融合出现误差就很危险了,另外水面纹理不清晰和透明反光,尤其当飞机在水面上快速飞行,会严重影响飞行器下视系统的工作,会影响到飞机超声波或者红外测高,导致下视系统测量出现误差,所以不想提控回家的同学,请珍爱飞机,远离水面; 7、 穿桥飞行:
有时候为了追求……我也不知道穿桥的亲们想追求什么,好好的大桥景观不拍,为啥就要去穿桥呢?一口老血就差点,噗……你知不知道这个操作有多危险?不清楚往下看: 无人机在穿桥之后,会出现什么情况?由于桥面遮挡,飞行环境GPS卫星信号将会变差,飞行器将会出现漂移,然后遥控信号也可能被遮挡,这个时候如果遥控信号断开了,飞机又不能悬停,飞机真是分分钟就见阎王了。 另外,很多利用GPS测量的数据会出现误差,简单举个栗子:GPS信号变差,GPS测量的高度值将会有误差,另外定位精度也会下降,如果此时主控相信GPS测量的高度,那么融合出来的高度就要出问题了,飞机高度控制就会出现问题,飞机在桥底然后高度控制出现问题,而且定位效果不佳,这个时候飞机不去见阎王还留着你卖萌啊? 还有,遥控器和飞机之间被桥面或者桥墩遮挡了遥控信号,飞机遥控信号如果断了,最常见的设置就是飞机会触发失控返航,飞机在桥底触发失控返航,oh my god,飞机返航上升的画面真的不要太美…… 所以,好好拍照,就不要去寻求什么刺激的穿桥操作啦。 8、 姿态模式(Atti模式)飞行:
这个情况经常发生在新手身上,因为啥也不懂,还不看说明书,飞机到手就起飞。遇到最搞笑的是有的同学点了App一键起飞之后,就不知道怎么让飞机停下来了。 回归主题,首先说明一下姿态模式飞机是啥情况,采用大疆的说明是:姿态模式下,飞行器容易受外界干扰,从而在水平方向将会产生漂移,并且视觉系统以及部分职能飞行模式将无法使用。因此,该模式下飞行器自身无法实现定点悬停以及自主刹车。简单点讲,飞机在姿态模式无法悬停刹车,也没有避障,会漂移,仅提供姿态增稳(打杆可控制飞机姿态)。
那飞行器为什么会进入姿态模式:
1) 对于可以手动切换到姿态模式的机型,飞手可以手动切换遥控器档位到姿态档(A档),飞行器就会进入姿态模式; 2) 环境卫星信号差、且不满足视觉工作条件(具体视觉的工作条件请查看用户手册),飞行器将会被迫切换到姿态模式; 3) 如果飞行过程中飞行器受到指南者干扰,飞行器有可能会切到姿态模式;
对于这种模式,大家也不要慌,如果技术还不到家的同学,就尽量不要让飞机进入到这种模式了,具体怎么做,就是避免上面的这些场景咯,比如:不要自己手痒切到姿态模式,不要大晚上还在楼层中间或者没有卫星信号的地方飞,避免那些有干扰的地方飞……最好就是在空旷且卫星信号良好,远离干扰源的环境飞行。然后对于自我感觉良好的同学,那就请便了。 欲知更多炸机见解,请看下回分解!!!
| 


 /2
/2 



 发表于 2018-1-4 13:46
发表于 2018-1-4 13:46









 收藏
收藏
