PID设置有效的方法---在cleanfligh的blackbox中去具体分析方法 从国外大神评论家论坛翻译过来的,自己学习学习,也分享给大家,希望大家共同进步。翻译过程可能有些地方不够准确,希望论坛里大神发现后能指正,希望通过大家的努力能使各自穿越水平有所提升。 有些朋友可能需要原链接http://blog.oscarliang.net/pid-tuning-blackbox-basics/ 在这篇文章中我将分享我是如何运用cleanflight中的blackbox去通过以下基础且简单的步骤去调整我的PID。 PID 的调节是四轴飞行器和FPV中的重要部分,最原始的PID 调节方法是猜测法,猜测一个数字然后飞一会,感觉不对然后修改看看钰上次有什么不同,这样的方法费时费力而且很枯燥,最重要的就是还不一定调节的好。或者还有一种方法就是照抄他人的PID ,然后做一定的修改,毕竟每台飞机的配置、电池、重量比等都是不一样,照抄他人配置不一定适合自己。Cleanfligh中的blackbox的发明就是为了使PID的调节成为一种简单直观的事情, 它使得我们调节PID的效率和准确性更高。在blackbox中你能看到是什么引起了飞机的震荡,而且通过提示可以知道调节哪些PID的值。 如何设置cleanfligh中的blackbox? cleanflight中的blackbox能够帮助我们有效的调节PID,它能够诊断出任何你的飞机飞行中的任何问题。这一段将介绍什么是blackbox,怎样运用blackbox的日志去调节你飞机的PID。 Blackbox存储数据的方式有两种,分别取决于你所用的飞控。例如我们常用的naze32,它有2MB的flash缓存,能够存储你的飞行日志供blackbox食用,但是带气压的naze32是没有flash缓存的,那就需要外接一个minisd卡莱存储数据了。(玩穿越的有人会买9轴的那个贵的版本吗?) 飞控的flash缓存只有区区的2MB,它相当于设置looptime=2500中存储大概3-4分钟的飞行数据。即使是现在最新的F3也只有8MB,还是相当的有限的。 Blackbox在cleanfligh中的设置 1. 点勾选图片中黄色方框中  的 的blackbox 选项,或者你可以在CLI 中输入(featureblackbox )。2.在CLI中输入(setblackbox_device=SPIFLASH )这个是用来设置运用自身的flash存储飞行日志。
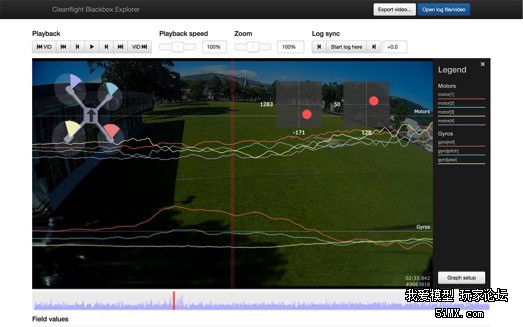
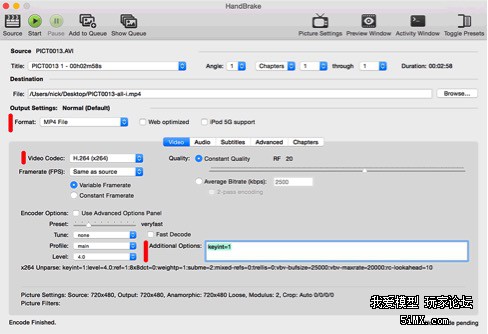
配置blackbox blackbox中目前提供两种速度来控制存储飞行日志(blackbox_rate_num和blackbox_rate_denom)。两种速度都是以分数的形式呈现出来,二这是你设定的内部迭代存储的不同将影响日志的结果。(如果你没有用外存,那么这里可以忽略,默认状态下是1/1,10.25kB/s,如果是外部存储请使用set blackbox_rate_num=1 和setblackbox_rate_denom=2,及设置成1/2速率) 建议使用looptime=2400和默认1/1存储速率,由于naze32中的flash内存只有2M,运用以上的设置只能存储3分钟的飞行日志信息,虽然只有3分钟,但是也已经足够了。如果你想存储更长时间的飞行日志,那么请将存储速率设置减小(减小至1/2,如果要有限内存存储最大时间飞行日志,请设置成1/32,这样日志的存储速率大概是10-20HZ(650bytes/s)这样2MB的内存将能存储将近50分钟的飞行日志)。 Blackbox 从你解锁开始记录飞行日志直到飞机重新上锁为止。当你飞行完之后你可以用cleanflighr 去导出你的飞行日志,如图选择“dataflash ”后点击“save flash to file…. ”,存储时间在2-3 分钟。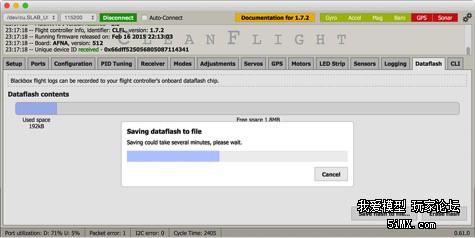 下载完成日志后记住通过点击“erase flash”删除现有日志以腾出空间存储以后的飞行日志。如果你的存储空间满了之后你没有清除,那么blackbox将不会继续存储任何日志。由于飞控自带的存储空间有限,所以你可以在Modes中去设置blackbox在你允许的模式中才记录你的飞行日志,而不是任何时间飞行都存储。 当你下载了你的飞行日志之后你可以运用https://github.com/cleanflight/blackbox-log-viewer https://github.com/cleanflight/blackbox-tools这个网页是的软件去图形化的查看你的飞行日志,并且还能与你的飞行视频去同步。 在以上网址下载软件解压后点击index.html就能自动打开网页运行了。
Blackbox日志里都记录了哪些内容? 我们的测试非常的简单,只需要几分钟时间的飞行日志就可以了。首先要如下几个步骤: 1. 将你飞行模式设置成Rate mode(Modes里面不做任何设置就默认为Rate模式) 2. 让你的飞机悬停,然后先前飞行几秒钟 3. 左右晃动你的飞机几次(左杆45°,右杆45°)Roll 4. 做几次360°的横滚(左滚右滚各几次) 5. 前后晃动你的飞机几次(前杆45°,后杆45°)Pitch 6. 做几次360°的前滚后滚翻(前滚后滚各几次) 7. 左右方向各几次(左右方向各45°)Yaw 8. 左右方向各360°转向(左右方向各几次)
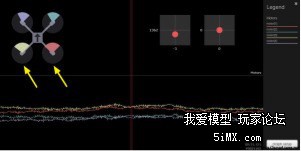
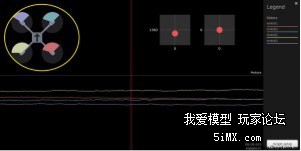
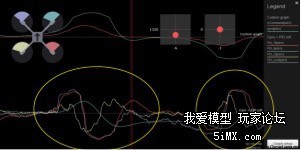
分析blackbox数据阶段 1.检查一些基础的项目 在设置PID 之前首先我们要检查一下每个电机的输出是否正常,必须确保电机输出的正常,否者得到的飞行日志数据将是无效的。 我们先来看看悬停时候的飞行日志数据,每个电机输出的水平应该是相近的,如果不相近有可能是一下两个原因:1.飞机的重心可能不在正中间;2。螺旋桨或者电机有问题。 如上图所示,后面两个电机转速相对于前面两个电机要猛烈(看上面四色旋翼扇形的大小),原因是重心靠后,那么就是你的电池的放置的位置靠后了。如果只有一个电机转速过高那有可能是电机或电调存在潜在的损坏。 如果像上图一样在悬停的时候每个电机转速都几乎一样,那么说明飞机悬停状态就没有任何问题。(注:四个电机转速不需要一模一样,只需要相近就行了)
| 


 /1
/1 



 发表于 2015-12-18 17:29
发表于 2015-12-18 17:29



 收藏
收藏


