小神艇5#,Ka50共轴双浆的研究,改进及问题
本人最近购得小神艇5#,Ka50二手及空机DIY发烧,有点体会,与模友共享.
1.本人购得小神艇5#二手无任何损坏,但并不像宣传当中那些稳定,仍然与JABO一样,只
是起飞时不会一边倒,但尾巴锁得非常好,几乎不动.仔细研究发现一是舵机不仅间隙大,回
中时还要晃两下,二是斜盘太软,打舵时晃来晃去的,于是先用黄铜皮做了个金属斜盘,舵机
顶上连接斜盘处用两颗2MM轴承,装上试飞,效果很好,可以在一米宽的地方起来稳稳的停住,
但原配的遥控器手感太差,想试用RD6000来配,将接收机拆开用示波器找到接收部分的RD6000
发出的PPM信号,信号波型幅度与原配的发射机一样,但时间差几个毫秒,进入ATTINY26L单片
机后,就无反映了,后据了解,华科尔的遥控系统是非标准PPM制的,像华科尔这样的非标本人
经常会遇到,本人真不明白,我国的许多标准(像卫星信号落地,业余频道等)的为何一定要与
国际通行的标准相反.
2.Ka50综合了5#优点,斜盘等很多地方都结实多了,外中轴用了金属的,标准舵机等.但
如果将5#的整套中轴加上电机搬到K50上(当然要换自制的斜盘),你就会感到5#的机构又稳
定多了.
综上所述,本人的感觉是,5#原机(只是本人的二部)并不稳定,而且极不经摔,但改进斜
盘后将有很大改进,但非标的遥控器决定该机对于喜欢DIY的模友来说他的整套机械部分是
可取的,如果配上两只无刷电机,再将外中轴换成金属的,将是一部非常值得在家中甚至在
几平方米书房内飞的小东西.K50非常经摔,本人的脚架从3米高电源断了直落下都不会坏.因
此很适合初学者在家中练习,但两者都有一个问题-电机,时间稍长,两只电机性能开始不一
致,舵缧都调整不过来.因此很容易打转,尤其是5#的上层浆电机风吹不到,温度非常高.
3.本人的二手共轴混控时好时坏不稳定,好的时候用可以在0.5米范围内稳稳的起飞到
两三米高,可以落在立式计算机箱上.有时是一开始好,一两分钟就乱转了,有时还会中途断
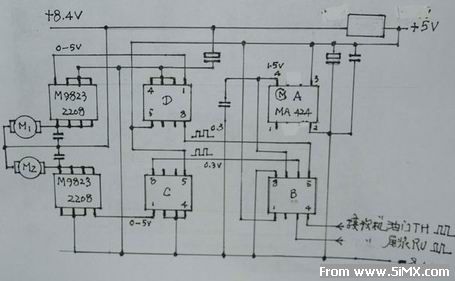
电,现把测绘图贴出请高手指点:
A.该电路极简单,但除末极推动两只电机的贴片外,其余B,C,D型号被搽掉,A是舵缧传感
器,接法与刘老师的自制舵缧不同,2脚接地,3脚接正5V,刘老师与5#都是接3V,这里有什么区
别,4脚感度输出,与5#一样,在动作时用输出有变化,1脚空,5#接一电容,而刘老的是接地.用
表碰时输出会大幅变化.请求这种接法是否是不稳定的因素,另外,传感器外标的MB419和MA
424有何区别.
B.传感器电压信号与接收机信号同时进入贴片B(脚号是乱编),用示波器观测从5,6两脚
输出两路己经混控的脉宽信号,特点是油门TH从5脚出,被加宽一点,而尾浆RU则减少,推油门
时,RU输入脉冲变小,而经混控后则加大,当然摇摆传感器输出脉冲也变化, 只是难分辨.5,6
两脚的脉冲信号可以驱动无刷电调,请问这是块什么片子,如果不是单片CPU,那这个电路就
太简单了.
C.混控后的脉冲信号进入C,D两片贴片,从1脚(脚号是乱编)输出对应的0-5V直流电压
信号,6,7脚空,请问这又是什么片子可以直接解调脉宽信号.


 |



 /2
/2 



 发表于 2005-6-17 19:53
发表于 2005-6-17 19:53

 收藏
收藏 发表于 2005-6-17 23:36
发表于 2005-6-17 23:36




