:em02::em02::em15::em15:
以前刘老师有一篇贴是介绍用废掉的压电陀螺仪传感器DIY陀螺仪的,我一直想把航空模型杂志上的那篇文章找出来,可许多书籍都留在以前的模型公司找不到了,只好托朋友将日文的原版杂志传过来,编译过贴出来给诸位玩家参考参考,没准用得上;
下面的是日本《ラジコン技術〉的文章翻译编汇的文章内容,介绍压电陀螺仪的电路结构;
电路如图:
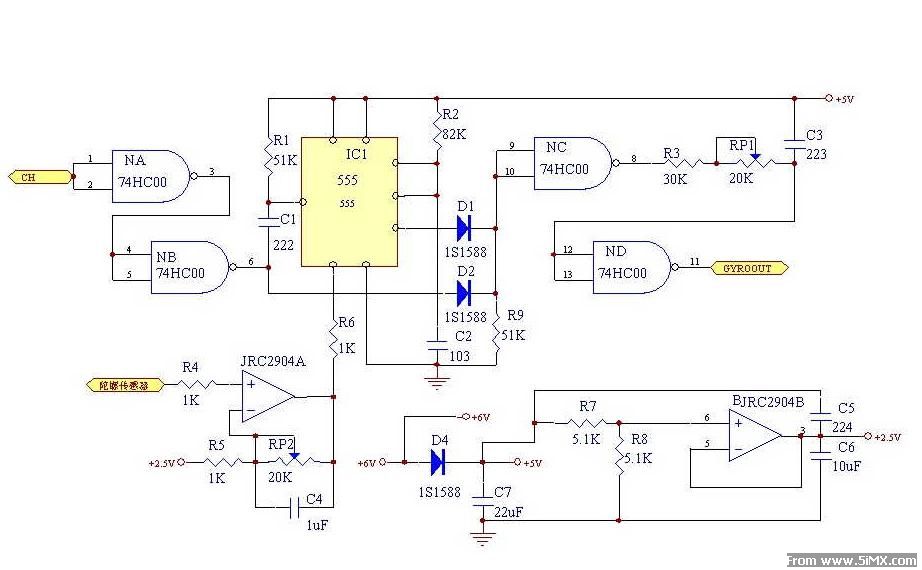
原理:利用压电角速度传感器输出的电压信号控制555时基组成的压控单稳态电路产生与接收机信号同步的控制脉冲驱动后级的尾桨螺距伺服舵机;
接收机的脉冲信号经过两级与非门的缓冲后,一路被R1C1微分,作为555压控单稳态电路的触发信号;另一路与单稳态电路输出的变宽度脉冲相加;
压电角速度传感器输出的电压信号被运算放大器缓冲放大后作为压控电压驱动555压控单稳态电路;
接收机的脉冲与555压控单稳态电路输出的脉冲相加后宽度远大于标准的1-2ms伺服脉冲宽度,因此NC与非门的缓冲反相后的脉冲经过R3RP1D3C3ND与非门积分减宽后输出符合标准的1-2ms伺服脉冲;
电路中,电位器RP2可以改变运算放大器的放大倍数,起到感度调节作用;而RP1可以改变输出脉冲宽度,起到舵机中位点的作用;
电源电路:6V的电源电压被D4分压后得到5V电压给压电角速度传感器供电;运算放大器组成2.5精密稳压源作为压电角速度传感器电压信号放大器的增益调节参考电压;
元件选择:为缩小尺寸,所有的元件应选用贴片元件;运算放大器和与非门应选用工业级的;
安装调试:
PCB板做好后,首先焊上除R6的其他元件,接通电源;转动PCB板,用万用表可测得JRC2904组A的输出端有变化的电压,OK;舵机连接到电路上,摇动发射机的操纵杆,舵机动作,OK;焊接R6,将RP2置于中位,连接舵机,通电;OK;
调节:RP1调节尾桨螺距伺服舵机的中点位置;RP2调节陀螺仪的感度;
原文还有一些口水话,就不写出来了;
要是压电角速度传感器可以单独买到就好啦!咱自己玩玩该多好!
对了,这个电路还可以用到其他地方:将压电传感器换成磁阻传感器,就可以做成方向锁定的导航仪,妙! |



 /2
/2 



 发表于 2004-10-6 11:46
发表于 2004-10-6 11:46

 收藏
收藏 发表于 2004-10-8 09:15
发表于 2004-10-8 09:15

