|
无头模式 |
|
顶一个 |
|
很清晰,不错!!谢谢 |
|
淺顯易懂 簡單名療 |
|
看了此图才搞懂啥是CL和HL,多谢楼主 |
|
这不就是智能航向吗,简单地说就是不认机头飞 |
|
这个很好,很实用,收藏了,虽然已经明白了,但还是要顶的。 |
|
回帖为了收藏。。。看明白了~ |
|
很实用 |
|
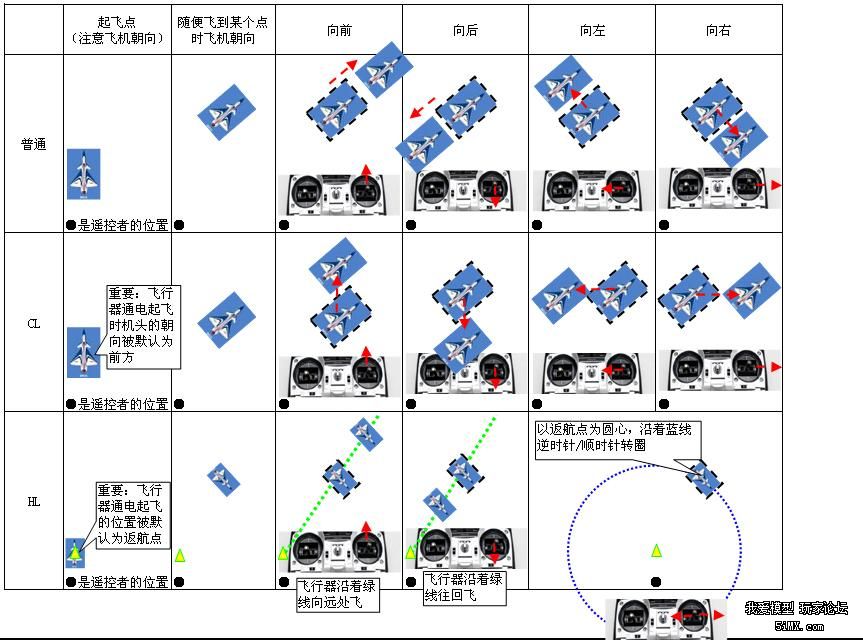
文字解释: 航线锁定:确认你站的方向和机子面向的南北方向不要变、GPS姿态、LED灯绿灯慢闪(搜到最多的星)、飞出20M、随意旋转机身方向(假设搞不清头尾了)、开关打到“航线锁定”(此时机身现实向前的方向就变成机头了,也就是机头机尾被从逻辑上改变了,也有模友称之为无头模式),你回拉升降舵(前后摇杆),机子就会延与你垂直的方向回来。前后左右均是如此。比如,如果它在你的左前方,就会回到你的左面(反之则反)。相对你所站的位置,你操作机子前后左右,它做的都是直线运动。 返航点锁定:GPS姿态、LED灯绿灯慢闪(搜到最多的星)、飞出20M、随意旋转机身方向(假设搞不清头尾了)、开关打到“返航点锁定”,此时无论机子在你的什么方向,只要你一回拉升降舵,机子就会延斜线回到原起飞点(会有少许误差),你若横拉副翼,机子会围着你画一个圈。 |
|
感谢楼主 |
|
实用的功能 |
|
没看明白是个什么意思 |
|
这个功能很有用,看不清姿态时,可以拉回你的身边,不用考虑机头方向。 |
|
这个不错,基本看懂了 |
|
比说明书的更易看懂 |
|
本帖最后由 老顽童退休生活 于 2013-9-30 12:54 编辑 非常清楚!感觉返航点锁定很有用,特别是飞远了很难判断机头方向时控制返航,比关控返航安全。 |
|
楼主好人,当初这个问题我也没有搞明白,后来找块空地实际试验下,全清楚了。 |
 /2
/2 
 收藏
收藏
