本帖最后由 friend0720 于 2019-4-13 12:08 编辑 鹏鹏啦啦 发表于 2019-4-12 00:52 正解!因为姿态误差,或者陀螺仪零点误差,飞控需要调整飞机姿态来消除误差,但因为没有桨飞机无法真正调整姿态,所以无论飞控如何调整误差依然存在,最终导致 PID 积分项不断增大甚至饱和,所以最终某几个电机是疯狂的转。 谢谢你的提醒,否则我会以为大力飞控有问题,刚买了F4 AIO 还没到货。  |
| 电机方向等都设好了,我试飞下看 |
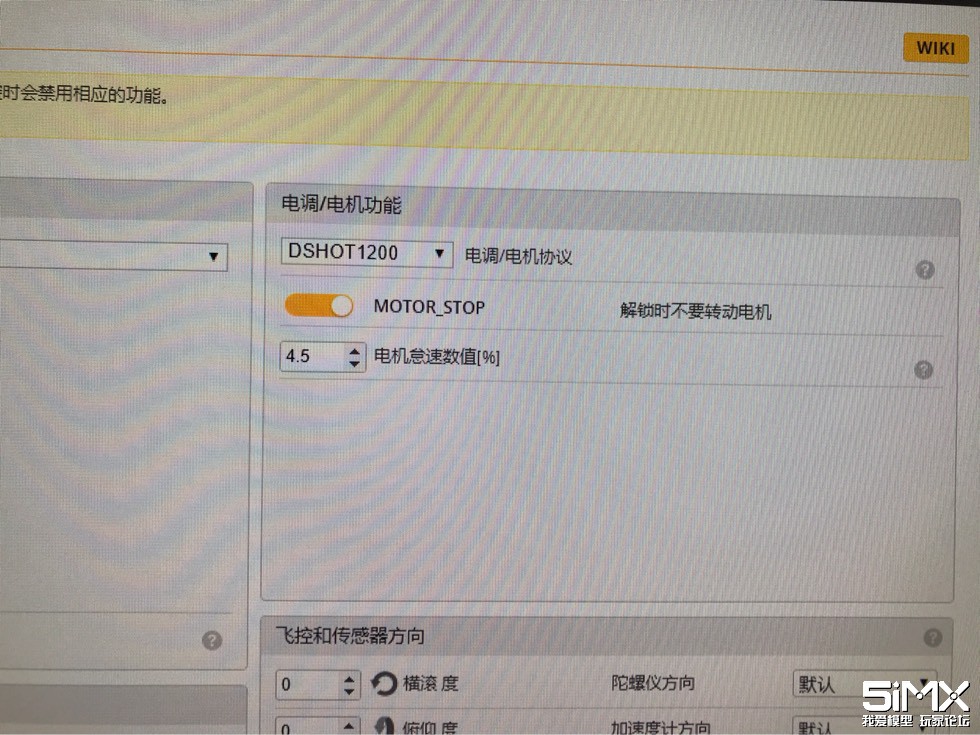
| 估计传感器和内部软件有什么BUG,实际飞一下就知道了! |
鹏鹏啦啦 发表于 2019-4-12 01:06 先确定一下电机方向对不对 |
 /1
/1 
 收藏
收藏


