水手smile 发表于 2017-1-11 13:28 欣赏你的风格, 玩开源最好多上官网,旧帖教程等,先弄清楚问题,不是上来就提问题。 |
欢迎继续阅读楼主其他信息
停不住 发表于 2017-1-11 11:57 一语中的啊!我按照你的提示去ardupilot官网找到了定高模式的common problems,里面第一条就如大神所言!我这次炸鸡是刚换了一副质量很差的桨之后的首飞,震动增大很多,由此也能推断就是震动惹的祸。 感谢大神指导! |
|
不必看LOG,可以推测是震动超标; 遇到这个情况,切回自稳后慢慢降落。 |
|
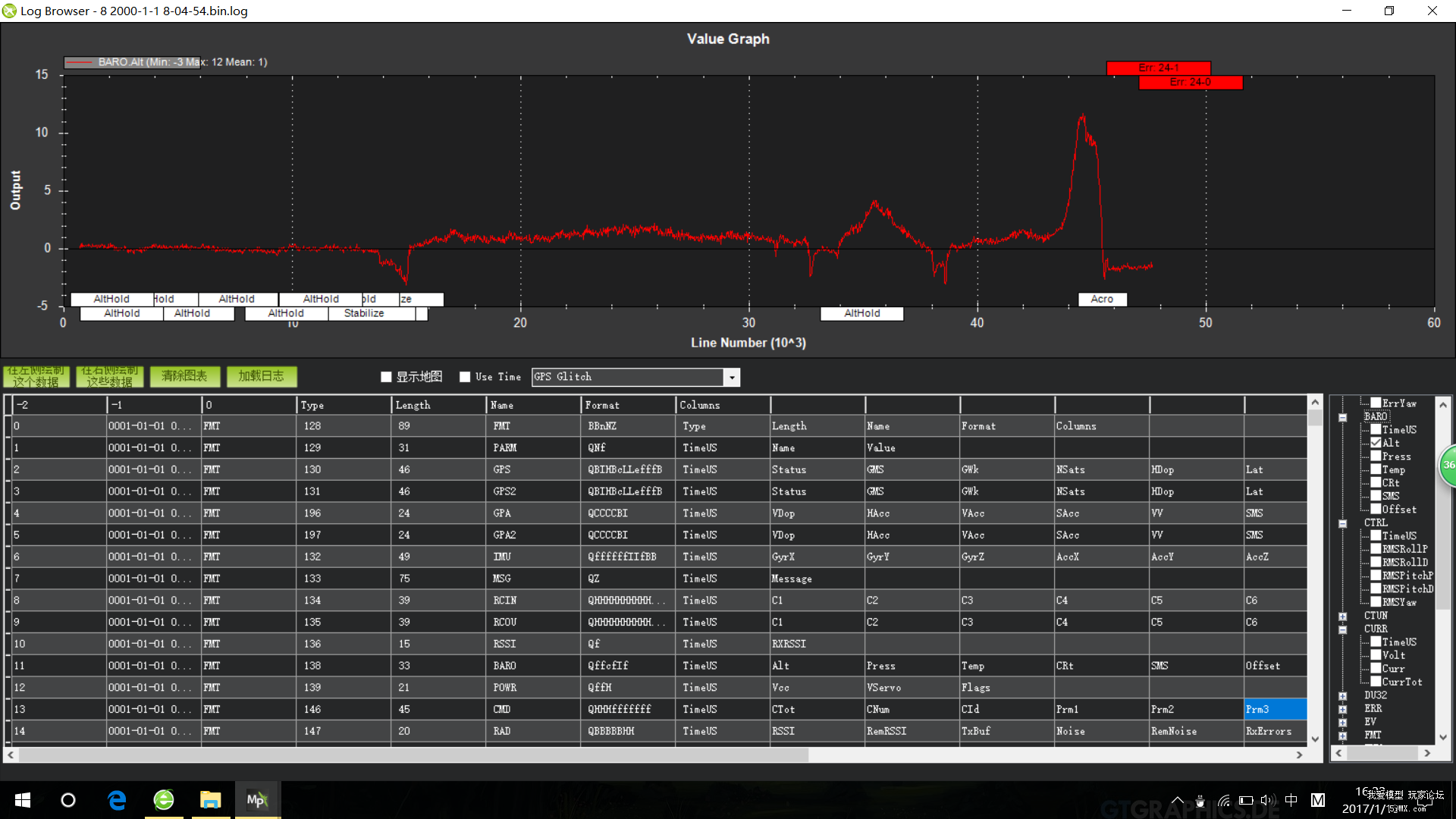
看了半天没看出问题,遥控确实没打升舵,对电机的输出确实增加了,高度计确实记录到了上升,传感器的记录符合你的描述,说明传感器都没错,那真的是MCU算法出问题了?唯一一个可疑的地方是43.5秒的时候小小的打了个方向舵,那时候飞机开始异常上升,不知道那个是你有意识的操作还是异常,反正大幅度打方向舵在PID没调好的时候是可能导致异常蹿升的,但是蹿升一般还是可控的,敢用特技救机,说明是大神,但是我还是建议用自稳救机,任何情况下不要开简单模式和超简单模式,最好不要开地理围栏,这样的话除非IMU出问题,否则都救的回来,特技模式一下子变到直机操作,有时候会反应不过来炸鸡,还不如自稳,如果自稳飞机都摔了我觉得也认了吧,毕竟IMU都出问题那就是老天要你摔机,认命吧 |
 /2
/2 
 收藏
收藏

