9084137625 发表于 2016-8-7 11:24 浮动几个数字是正常的,差四五十就不正常了 |
9084137625 发表于 2016-8-7 01:28 配置插件最下面状态栏 |
isjfk 发表于 2016-8-5 16:19 请问实时looptime如何查看 |
 来自安卓客户端
来自安卓客户端|
买电调送辣条,就是这么任性! |
|
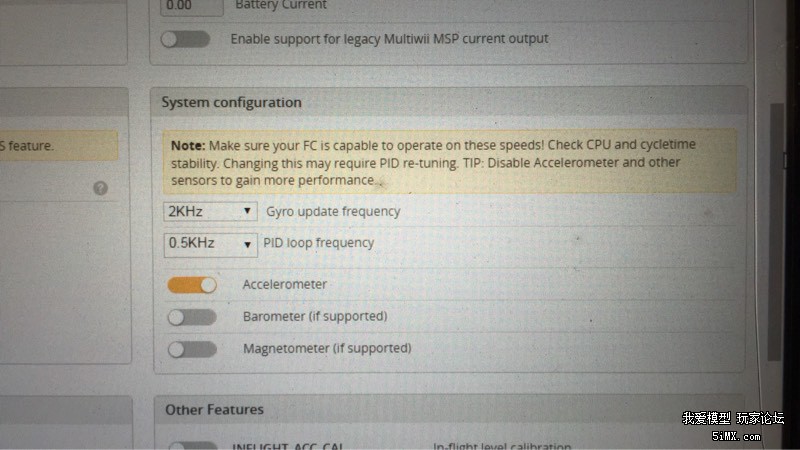
freq设了之后,观察下最下面的实时looptime是不是能达到1/最高freq。例如gyro设2k,pid设1k,保存后如果looptime不能稳定达到1/2k=500ms,建议把freq适当降低 |
|
如果启用了softserial,把pid设为gyro的一半,否则可能会导致软串口来不及处理造成外设异常。 |
|
学习了,好贴留名 |
|
关注一下,学习学习 |
9084137625 发表于 2016-8-1 15:23 因为飞控内部的协议不同。请看附件。 |
154902bzzcrtw4cae0j6j0.jpg (131.2 KB, 下载次数: 3)
JoshuaBardwell

9084137625 发表于 2016-8-1 15:22 上面是陀螺仪,下面是PID,双2K就是两个都为2K. |
fyresg 发表于 2016-8-1 11:04 为什么naza32 和 cc3d不同 他们都属于F1的吧 |
来自安卓客户端
liujiang168 发表于 2016-8-1 08:28 这两个数值选择的都代表looptime? 你说的双2K意思就是上下两个都选2K吧 ? |
来自安卓客户端|
所有F1飞控:PID loop frequency = 2kHz. 属于F1飞控的CC3D:Gyro update frequency = 8kHz 属于F1飞控的NAZE32:Gyro update frequency = 4kHz Joshua Bardwell在YouTube说的。 |
|
本帖最后由 liujiang168 于 2016-8-1 08:32 编辑 对,值越高执行频率越高,也就意味着单位时间内执行的次数越多,或反之执行的周期就越短,这个时间就是LOOPTIME,是执行效率的另一种表达方式,比如1K,就是1000MS,2K就是500MS了,依此类推;4K是比2K热一些,但正常情况下不会热得过份,有一个因素是在有桨不平衡时会引发所有电机发热量剧增,所以主飞动作想追求更高的飞行质量尽可能用双4K且用平衡好的桨,发现炸过不平衡的桨尽早更换,如果只是练手用的那就用双2K飞吧,尤其是夏天温度高时。 |
liujiang168 发表于 2016-7-31 22:58 感谢 感谢 这个值越高 代表陀螺仪的执行频率? 他和looptime有什么区别?我是f3. 意思是f3的3代芯片理论能支持到4K?我听说4K会导致电机过热 。那大家一般设置多少呢? |
来自安卓客户端|
本帖最后由 liujiang168 于 2016-7-31 22:59 编辑 如果是CC3D和NAZE32改为全2K即可,如果为F3改为全4K,当然低于这个值也行,理论上精度变差了呗,下面两个选项去掉是对的。 |
 /1
/1 
 收藏
收藏


