kenken 发表于 2015-6-13 19:44 您的意思是说,GPS定点 我用POSHOLD 放弃loiter模式吗 |
wenzi150 发表于 2015-6-13 19:00 先了解APM的飞行模式吧,你说的GPS定点应是留待模式,定点模式旧称混合模式,反响已很敏捷的 
|
kenken 发表于 2015-6-13 00:40 麻烦您 还有个问题 ,怎么能让 gps 定点悬停的模下 速度快点, GPS 模式下 速度太慢,推到顶 也就 10度角 ? |
kenken 发表于 2015-6-13 00:40 说定点模式容易和 留待模式混淆 我还是比较喜欢叫做混合模式 话说我 没调过刹车力道 感觉Poshold 下 松杆 慢慢滑行减速 正好 |
SageST 发表于 2015-6-13 00:16 poshold中文官网译作定点模式,混合是早期3.2 楼主是用那个版本固件,那介模式飞的?那个模式松干能急停?定高 定点poshold试过了是不行的,打反舵才可,自动刹停参数调最大值也不行,回想早期3.2称混合模式时,才有刹停感觉 |
wenzi150 发表于 2015-6-12 19:53 Althold 是定高 PosHold 是混合模式 |
SageST 发表于 2015-6-12 18:02 是啊 一松杆 就刹车了。。速度快点都要倔翻了。。  咋弄啊 大神们 咋弄啊 大神们 |
kenken 发表于 2015-6-12 18:28 麻烦请问 ,poshold 具体是啥模式~ |
wenzi150 发表于 2015-6-12 16:32 把二个参数调大,但实践过不怎样,你可一试,只对应poshold模式有效
|
|
定高模式是没有自动刹车的 你确定模式是 Althold 不是 poshold? |
|
动力储备不足,调pid隔靴搔痒。 |
|
这参数一看就是自动调出来的。 看这套参数,我猜你的机器云台很靠前导致飞机的重心相当的偏。 你试试左右打满舵是不是也出现同样的情况,另外就像楼上说的,定高模式不适合这么暴力的操作。 |
kenken 发表于 2015-6-12 16:05 请问,就是 自动刹车 怎么调整力度? |
kenken 发表于 2015-6-12 16:05 好的 谢谢 我试试。 |
|
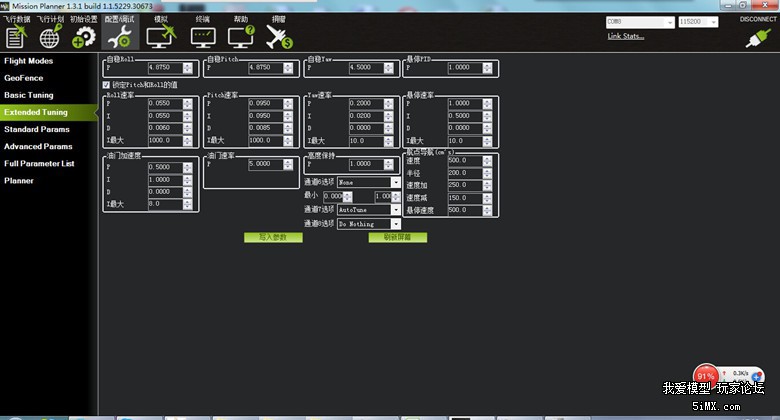
apm预设最大倾角就是45度,满干前推後拉掉高都正常,尤其四轴,低空下不见议这样操作,要调高上升下降速率,调图片红框二个值,每次别调太多,尤其下降速率
|
 /2
/2 
 收藏
收藏
