wangguanfu 在 2004-12-23 16:14 发表:
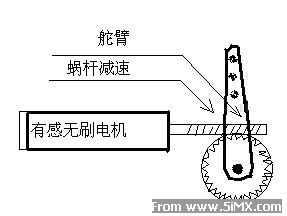
蜗杆减速机构
micro 在 2004-12-23 05:07 PM 发表:
就这一条你的设想就完了。
micro 在 2004-12-23 05:16 PM 发表:
难道你不知道蜗轮蜗杆减速的效率很低吗?还有你的位置反馈信号哪来的?
wangguanfu 在 2004-12-23 17:24 发表:
蜗轮蜗杆减速的效率很低???
谁说的啊,变速比可变
位置反馈,这可是关键
wxyyz 在 2004-12-23 06:13 PM 发表:
先弄明白电位器是干什么的
hbhero 在 2004-12-23 06:13 PM 发表:
老兄,我不明白的是,你的反馈怎么办呢?
suncxc 在 2004-12-23 11:06 PM 发表:
那跟步进点电机作的有什么区别?也只是电机主轴的位置而已,还是要记忆转过的圈速,结构复杂,不见得比电位器的好
suncxc 在 2004-12-23 11:06 PM 发表:
那跟步进点电机作的有什么区别?也只是电机主轴的位置而已,还是要记忆转过的圈速,结构复杂,不见得比电位器的好
micro 在 2004-12-24 08:47 AM 发表:
断电之后位置变化了谁能知道?难道每次上电都来个机械调零?
会飞的鹌鹑 在 2004-12-24 03:31 PM 发表:
楼主不要电位器的目的我想是因为电位器磨损后会造成抖舵,但舵机的电位器是反映输出轴角度变化的传感器,去掉它而不安装其他的角度传感器是无法完成输出轴的初始定位和跟随遥控手柄角度变化而比例转动的,目前达到 ...
suncxc 在 2004-12-23 11:42 PM 发表:
唉,我是觉得不实用,你试试看吧
suncxc 在 2004-12-23 11:42 PM 发表:
唉,我是觉得不实用,你试试看吧
会飞的鹌鹑 在 2004-12-24 03:31 PM 发表:
楼主不要电位器的目的我想是因为电位器磨损后会造成抖舵,但舵机的电位器是反映输出轴角度变化的传感器,去掉它而不安装其他的角度传感器是无法完成输出轴的初始定位和跟随遥控手柄角度变化而比例转动的,目前达到 ...
goldllc2004 在 2004-12-29 11:54 PM 发表:
狐狸兄:哪个地方能买到你说的线性霍尔传感器。我想试一下。你做过没有呢?感觉怎么样?
| 欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://5imx.com./) | Powered by Discuz! X3.3 |