5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
标题:
问问大家是否愿意我公开无刷电调程序
[打印本页]
作者:
ququbin
时间:
2008-7-8 20:34
标题:
问问大家是否愿意我公开无刷电调程序
以前我发了一个电调启动的视频,可是有一位"高手"说我在炫耀
这次我先征求一下,大家是否愿意我公开这些资料
两个目的:
1帮助其它想知道怎么DIY电调的朋友
2.得到真正的高手的指点
如果大家认为我在炫耀,不受欢迎,那我就不发资料了
作者:
gushan
时间:
2008-7-8 20:51
提示:
作者被禁止或删除 内容自动屏蔽
作者:
yqyqingyv
时间:
2008-7-8 20:58
最好把好盈的程序公布出来
作者:
woshisui
时间:
2008-7-8 21:04
好事呀,公布吧!学习!
作者:
流川枫
时间:
2008-7-8 21:16
公开出来吧~
作者:
无刷电直
时间:
2008-7-8 21:22
这是好事,当然要公布,那些说闲话的人就当他放屁
作者:
天涯明月刀
时间:
2008-7-8 21:28
这么好的事,怎么会有人反对?一定是厂家的人吧?
作者:
guguaigu
时间:
2008-7-8 21:36
你很烧包啊!要公布就公布啊!着东西不是所有人都懂,说出来学习下可以的!要是拿来骗分就不对了~
老婆说买酱油不可以太久~拜拜!
作者:
ququbin
时间:
2008-7-8 21:47
标题:
回复 #8 guguaigu 的帖子
我正在传,别骂我呀!
http://6.cn/player.swf?flag=0&vid=NQllCJTbP7hRXOGOeNp8wg
[
本帖最后由 ququbin 于 2008-7-8 23:01 编辑
]
作者:
ququbin
时间:
2008-7-8 21:59
下面是程序,我认为没多大用,可要是不发,好害怕会被大家骂
我先发了
以后慢慢给大家分段解释
作者:
ququbin
时间:
2008-7-8 22:06
.include"m8def.inc"
.dseg
.org 0x0a0
;换相时间为tf,过零时间tg
zkb:.byte 1 ;占空比
tf1h:.byte 1 ;换相时间1
tf1l:.byte 1
tf2h:.byte 1 ;换相时间2
tf2l:.byte 1
;--------
tfch:.byte 1 ;t1的初值6d,6e
tfcl:.byte 1
t0a:.byte 1
t0b:.byte 1
t0bz:.byte 1
;---------------
t0_ch:.byte 1 ;t0初值
t0_fp:.byte 1 ;t0预分频模式
ys_h:.byte 1 ;延时与记数值
ys_l:.byte 1
js_h:.byte 1
;--------
.org 0x0af
js_l:.byte 1
bzq00:.byte 1
tf3h:.byte 1
tf3l:.byte 1
jwch:.byte 1
jwcl:.byte 1
jwc01h:.byte 1
jwc01l:.byte 1
;03版;03版
;-------------
;03版
wch:.byte 1
;--------
wcl:.byte 1
wc01h:.byte 1
wc01l:.byte 1
wc001h:.byte 1
wc001l:.byte 1
;--------
jih:.byte 1
jil:.byte 1
tfc0h:.byte 1
tfc0l:.byte 1
tfcyh:.byte 1
;--------
tfcyl:.byte 1
tfcmh:.byte 1
tfcml:.byte 1
tfcsh:.byte 1
tfcsl:.byte 1
;--------
jsji:.byte 1
jsja:.byte 1
jstz:.byte 1
jsjs:.byte 1
eeah:.byte 1
;----------
eeal:.byte 1
ckz_0h:.byte 1
ckz_0l:.byte 1 ;占空比低8位
.org 0x0d0
;****************
a001:.byte 1
b001:.byte 1
c001:.byte 1
d001:.byte 1
kongz:.byte 1
zkb01:.byte 1 ;过零前,pinc值
.org 0x60
stack:.byte 0x9f
.cseg
rjmp start ;----------跳到START段
;输入捕捉中断入口
.org 0x005
.org 0x06
;比较a
rjmp guanb
.org 0x07
;比较匹配b
rjmp dakai
;t1溢出中断入口
.org 0x008
rjmp qzfx
.org 0x09
;T0溢出中断入口
rjmp tdian;-------
.org 0x0b
rjmp tace01
;dyd为启动段
dyd:
sbr r25,0b01000000 ;启动标志,6
sbr r25,0b10000000 ;屏蔽USART,7
ldi r16,0x20
sts zkb,r16
;锁定
suodin:
;允许T1溢出中断和输入捕捉中断,T0溢出 ,ocie2使能
out ocr2,r16
ldi r16,0b01110001;;设置t2,相位修正模式8分频启动t2,,----0输出,1截止 ;11
out tccr2,r16
sbi portc,2
sbi portb,2 ;ca
rcall dey02
rcall dey03
;*****************
cbi portb,2
sbi portb,5 ;cb
rcall dey03
;*******************
clr r16 ;-t1装入初值
ldi r17,0x02
sts tfch,r17
sts tfcl,r16
rcall gen
rjmp main
gen: ;8 更新t1初值
lds r16,tfcl ;2
lds r17,tfch
out tcnt1h,r17 ;1
out tcnt1l,r16
ldi r16,0b10000001 ;1
out tccr1b,r16 ;T1启动
ldi r16,0b00000001 ;为delay传送工作模式和初值
sts t0_fp,r16
ldi r16,0xc0
sts t0_ch,r16
ret ;4
;通电----------t0中断服务程序
tdian:
;*************
clr r16 ;1
out tccr0,r16 ;1
;================
lds r16,zkb ;更新ZKB ;1
;===================
out ocr2,r16 ;1
ldi r16,0b01110001;;设置t2,相位修正模式8分频启动t2,,----0输出,1截止 ;1
out tccr2,r16 ;1
rcall soucai
rcall tace02
rcall jsd01
jup01:
sei
reti
;主程序-----------------
start:
ldi r16,0b00100101
out timsk,r16
sei
ldi r16,0xdf
out spl, r16 ;堆栈指针
rcall dey03
rcall dey03
;pb定义
ldi r16,0b00111110
out ddrb,r16
sbi ddrc,1
sbi ddrc,2
rcall gdk ;关闭复位后,端口输出高电,功率管关闭
clr r25
;-----------------
;赋初值
dyd01:
ldi r22,0x02 ;步进
ldi r23,0x02
ldi r24,0x02
ldi r30,0x80
ser r16
sts tf3h,r16
;--------------------
ldi r16,0b00111000 ;过零端口上拉
out portc,r16
ldi r16,0b11111110 ;探测端口上拉置位
out portd,r16
out pind,r16
sbi portb,0
clr r16
sts zkb,r16 ;-----占空比
sts zkb01,r16
clr r17
sts kongz,r17
;----看门狗
out wdtcr,r17
;====================
usart: ;usart设置
cli
; 设置波特率;异步,U2X=0,fosc=8m,urr=1,误差=0.0% ,
ldi r16,0x01
clr r17
out ubrrh,r17
out ubrrl,r16
; tx使能,9 个数据位
; 设置帧格式: 9 个数据位, 1 个停止位,偶校验
ldi r16, (1<<URSEL)|(1<<upm1)|(3<<UCSZ0)
out UCSRC,r16
sei
tace:
rcall tace02
ldi r16,0xdf
out spl, r16
rjmp tace
main: ;在此等待
sei
ldi r16,0xdf
out spl, r16 ;重设置堆栈指针,防止溢出
rjmp main
;换相子程序,闭环和开环均需在此进入换相
;断电--关端口(pb124567)--调用子程序换相
fxd:
ldi r16,0xdf
out spl, r16 ;重设置堆栈指针,防止溢出
clr r16
out tccr2,r16 ;关t2
ldi r16,0b00001000 ;pb各端口赋值,关断各相
out portb,r16
cbi portc,1
cbi portc,2
rcall delay
ldi r31,0x0
ijmp
;换相指令段------------
.org 0x0080
zt01:
sbi portb,1
sbi portb,5 ;2
ldi r30,0x86 ;1
rcall gen
ldi r26,0b00001000 ;3c
rjmp main ; ab
zt02:
sbi portb,1 ; ac
sbi portc,1
ldi r30,0x8c
rcall gen
ldi r26,0b00010000 ;4b
rjmp main
zt03:
sbi portb,4 ;bc
sbi portc,1
ldi r30,0x92
rcall gen
ldi r26,0b00100000 ;5a
rjmp main
zt04:
sbi portb,4 ;ba
sbi portb,2
ldi r30,0x98
rcall gen
ldi r26,0b00001000 ;3c
rjmp main
zt05:
sbi portc,2
sbi portb,2
ldi r30,0x9e ;ca
rcall gen
ldi r26,0b00010000 ;4b
rjmp main
zt06:
sbi portc,2
sbi portb,5
ldi r30,0x80
rcall gen ;cb
ldi r26,0b00100000 ;5a
rjmp main
;***********
qzfx:
tst r24
brne ysh00
sbr r25,0b00100000 ;标志,5
wdr
ldi r16,(1<<wdce)|(1<<wde)|(1<<wdp2)|(1<<wdp0)
out wdtcr,r16
rjmp fxd
ysh00:
ldi r16,0x30
sts zkb,r16
dec r22
breq ysh
reti
ysh:
mov r22,r24 ;恢复r22的值(无变化
dec r23
breq ysh01
rjmp fxd
ysh01:
dec r24
mov r23,r24
rjmp fxd
;USART接收**********************
tace01:
in r18,ucsra
in r17,ucsrb
in r16,udr
cbi ucsrb,rxen
andi r18,(1<<fe)|(1<<dor)|(1<<pe)
breq tace00
reti
tace00:
sbrc r17,1
rjmp tace03
sts kongz,r16
reti
tace03:
mov r17,r16 ;判断01为ZKB
cbr r17,0b00000010
sbr r17,0b00000001
cpse r17,r16
reti
cbr r16,0b00000011 ;6位精度
sts zkb01,r16
reti
genf:
lds r16,zkb01 ;待机状态,直接刷新ZKB
cpi r16,0x20
brsh genf02
sts zkb,r16
ret
genf02:
rjmp qidd
genf01:
sbrs r25,6 ;已经启动则跳过
ret
sbrc r25,7 ;在启动阶段,此位=1 USART被屏蔽
ret
;**************************
lds r16,zkb
lds r17,zkb01
lds r18,kongz
clc
cpi r17,0x0a
brlo genf011
cp r16,r17
brsh genf001
rcall jisd ;加占空比
ret
genf011:
rjmp wdog
genf001:
rcall jand ;减占空比
ret
tace02:
cli
sbrs r25,6 ;6位为0待机
rcall genf
rcall genf01
ldi r16,(1<<rxcie)|(1<<rxen)|(1<<ucsz2)
out ucsrb,r16
;对KONGZ解码
lds r16,kongz
clr r17
sts kongz,r17
ldi r17,0b10110101
cpse r16,r17
rjmp kzi
rjmp qidd
kzi:
ldi r17,0b01011101 ;REST
cpse r16,r17
rjmp kzi01
rjmp wdog
kzi01:
sei
ret
qidd:
sbrc r25,6
ret ;屏蔽启动键
sbi pind,7 ;跳赋值和定时器启动段dyd
rjmp dyd
jisd:
;加占空比
lds r16,tf3h ;限速<0xea
cpi r16,0x0a
brsh jisd00
ret
jisd00:
sbi pind,2
lds r28,zkb
cpi r28,0xe0 ;占空比超过00xf0,则跳
brsh retd
lds r16,ckz_0l
ldi r17,0x04
clc
add r16,r17
sts ckz_0l,r16
brcc retd ;无进位,返回
inc r28 ;高位加1
sts zkb,r28
rjmp retd
jand:
sbi pind,1
;减占空比
lds r16,tf3h
cpi r16,0xf0 ;限速 >0x30
brlo jand00
sbrc r25,0
ret
jand00:
lds r28,zkb
cpi r28,0x0b
brsh jand01 ;小于,RSET
rjmp wdog
jand01:
lds r16,ckz_0l
ldi r17,0x04
clc
sub r16,r17
sts ckz_0l,r16
brcc retd ;无进位,返回
dec r28 ;高位减1
sts zkb,r28
retd:
ret
;加速模块,步进加速; 加TFCH(每次加4),tfc为t1初值,控制换相时间
;***************************************
t1_zj:
clc
lds r27,tfch
neg r27 ;取反,速度增加,负载增加,加速度变小
mov r16,r27
lsr r16
lsr r16
lsr r16
lsr r16
lsr r16
lds r17,tfch
add r17,r16
sts tfch,r17
mov r16,r27
cbr r16,0b11100000
;=======================
jus00:
clc
lds r17,tfch
lds r28,tfcl
add r16,r28
sts tfcl,r16
brcc jup
inc r17
sts tfch,r17
jup:
lsr r17
lsr r17
lsr r17
lsr r17
ldi r16,0x30
add r16,r17
sts zkb,r16
sts zkb01,r16
ret
;**********************************************************
;t0延时子程序-------------
delay:
lds r16,t0_ch
out tcnt0,r16
lds r16,t0_fp ;T0预分频8
out tccr0,r16
sei
ret
;==================
作者:
ququbin
时间:
2008-7-8 22:07
jsd01:
cli
sbrs r25,5
ret
;**************
sbrc r25,4 ;判断标志-------闭环状态标志
rjmp jianc01 ;直接进入检测窗口设定模块
;加速模块
lds r16,tfch
cpi r16,0x01
brlo tban00 ;速度低于0x30则跳过
cpi r16,0xf0 ;0xe0,加速结束
brsh tban01
;***********************
rcall t1_zj ;0X30以上,开始加速
;=================
sbrc r25,0
rjmp jianc00
tban00:
rjmp hhui01
tban01:
rjmp start
;******************************
;检测窗口设定tfcyh/tfcyl(a匹配)---------tfcmh/tfcml(b匹配)
jianc00: ;首次采集过零
lds r16,tfch
lds r17,tfcl
clc
neg r17
neg r16
mov r20,r16
mov r21,r17
clc
ror r16
ror r17
clc
ror r16
ror r17
clc
ror r16
ror r17 ;1/8--7.5
lds r18,tfch
lds r19,tfcl
clc
add r19,r17
adc r18,r16
sts tfcmh,r18
sts tfcml,r19
;===================
clc
neg r17
neg r16
sts tfcyh,r16
sts tfcyl,r17
jianc01:
lds r16,tfcmh
lds r17,tfcml
out ocr1bh,r16
out ocr1bl,r17 ;t0b在前 15度 7.5
lds r16,tfcyh
lds r17,tfcyl
out ocr1ah,r16
out ocr1al,r17 ;t0a在后45度
;*************************
ldi r16,0b00111101
out timsk,r16
hhui01:
sei
ret
;过零检测模块
dakai:
;关USART
cbi ucsrb,rxen
cbi ucsrb,rxcie
;抗干扰
kgr:
clr r16
clr r17
clr r18
kgr00:
in r20,pinc
and r20,r26 ;相应的位与1与运算,屏蔽
breq kgr01
inc r16
cpi r16,0x06
brsh dak00
rjmp kgr00
kgr01:
inc r17
cpi r17,0x06
brsh dak00
rjmp kgr00
;==================多数表决
dak00: ;6
in r21,pinc ;1
and r21,r26 ;1
cpse r20,r21 ;1/2/3
rjmp huanh01 ;2
rjmp dak00 ;2
;======================
huanh01: ;0x44 大约40个指令周期 补偿18*10 =0xbe
;记数 4
inc r18 ;1
cpi r18,0x0a ;1
brsh dak01 ;1/2
rjmp dak00 ;2
dak01:
wdr
cbr r25,0b10000000 ;解除USART的屏蔽
in r17,tcnt1l ;1
in r16,tcnt1h
clc
subi r17,0xbe
sbci r16,0x0 ;补偿
;*******************
sts tf3h,r16 ;2
sts tf3l,r17 ;2
mov r20,r16 ;1
mov r21,r17
lds r18,tfch ;2 取初值
lds r19,tfcl ;2
clc
sub r17,r19 ;1
sbc r16,r18 ;得到周期
clc
ror r16 ;1/2+0x10+0x44
ror r17 ;半周期
clc
ldi r18,0x55
add r17,r18
brcc huanh02 ;有无进位
inc r16
huanh02:
clc
sub r21,r17
sbc r20,r16
sts tfcmh,r16 ;tfcmh在前
sts tfcml,r17
;==============
in r19,tcnt1l
in r18,tcnt1h
clc
add r19,r17
adc r18,r16
sts tfcyh,r18
sts tfcyl,r19
;============
clr r16
sts tfch,r16
sts tfcl,r17
sbr r25,0b00010000 ;标记(检测窗设定标志) 4
rjmp fxd
;**********************
eepg: ;eeprom变址
cli
lds r16,eeah
lds r17,eeal
clz
cpi r16,0x01
breq xgai01
clz
inc r17
brne cru
rjmp xgai
xgai01:
inc r17
cpi r17,0xf0
brlo cru
xgai:
clc
inc r16
cpi r16,0x02
brlo cru
ldi r16,0x0
cru:
sts eeah,r16
sts eeal,r17
sei
ret
; ;延时模块******************
dey00:
ldi r16,0xff
push r22
dey01:
ldi r22,0xff ;锁定延时
rcall dey
dec r16
brne dey01
pop r22
ret
dey: ;4
dec r22 ;1
brne dey ;1/2
ret ;1
dey02:
rcall dey00
rcall dey00
rcall dey00
rcall dey00
rcall dey00
rcall dey00
ret
dey03:
rcall dey02
rcall dey02
rcall dey02
ret
;***********
guanb:
guanb00:
rjmp main
eepromw:
cli
lds r19,eeah ;2
lds r18,eeal ;2
out eearh,r19 ;1
out eearl,r18 ;1
lds r20,zkb
out eedr,r20;1
clr r20
sbi eecr,eemwe ;1
sbi eecr,eewe ;1
sei
ret
;----------
soucai:
sbrc r25,0 ; 判断标志寄存器R25;--------,有标志,返回
ret
lds r16,tfch
cpi r16,0xca
brsh soucai00
ret
;************
soucai00:
sbr r25,0b00000001 ;直接返回了,子程序多余 ,0
ret
wdog:
cli
;===============
clr r16
out tccr2,r16 ;关t2
ldi r16,0b00001000 ;pb各端口赋值,关断各相
out portb,r16
cbi portc,1
cbi portc,2
;==================
wdog00:
ldi r16,(1<<wdce)|(1<<wde)|(3<<wdp1)
out wdtcr,r16
rjmp wdog00
usart_flush:
sbis ucsrb,rxc
reti
in r16,udr
rjmp usart_flush
gdk:
ldi r16,0b00001000 ;关闭复位后,端口输出高电,功率管关闭
out portb,r16
cbi portc,1
cbi portc,2
ret
作者:
yhybear
时间:
2008-7-8 22:09
有点深度!慢慢学习,先谢谢!
作者:
ququbin
时间:
2008-7-8 23:04
启动的视频
第1,2次成功启动,第3次失败,第4次是自动重启成功
http://6.cn/player.swf?flag=0&vid=NQllCJTbP7hRXOGOeNp8wg
作者:
ququbin
时间:
2008-7-9 00:14
先说启动
启动是整个电调最难的地方
尽管其它的方面(比如MOS管驱动电路,比较器电路)我也做的不好,但我认为并不是很难
我参考的资料是"dsPIC30F 在无传感器BLDC 控制中的应用",各位可以用搜索引擎去找来看
我把启动分两步
第1是锁定,
转子的位置是不确定的,而第1次通电的相是确定的,在进行首次通电前,要让转子到达某个位子
而这个位子的下一个位子就是第一次通电的位置
具体说明:
通电顺序:AB--AC--BC--BA--CA--CB--AB
第1次通电AB
那么AB的上一次是CB,再上一次是CA
于是,让CA通电0.5秒,再让CB通电0.5秒,那么转子这时的位置的下一位置是AB
这个位置的锁定很关键
影响锁定的参数有电流IS,时间TS
设负载不变,当电流IS过大,转子到达位置后有振荡,阻尼不同,电流不同,从振荡到稳定的时间就不一样
具体的值我是靠估计加实验
规律是这样:
惯性越大,通电电流越大,通电时间越短(因为阻尼大,容易稳定)
惯性小,用小的电流,通电时间长
2408电机,KV1300,锂电池11.1V,桨1047
锁定电流大约2A--4A(我没有设备,测不了),在这个范围都行,也许这个范围还能更大
锁定时间大约0.5--1秒,这个时间应该可以更短,用示波器可以看到稳定的时间,可惜我没有这东东
第2步是步进加速,明天再说
作者:
zqzzy
时间:
2008-7-9 00:39
lz辛苦啦。
作者:
卫小星
时间:
2008-7-9 08:50
好有深度!慢慢看,学习!
作者:
bob488884
时间:
2008-7-9 09:51
惨了,看不懂汇编了,哈哈
作者:
fireyes7
时间:
2008-7-9 10:17
lz,有没电调的电路啊,一起分享了吧,让俺们学习一下
作者:
ckyo
时间:
2008-7-9 18:04
现在电调已经不算贵了,一般来说自制电调其实意义不大,主要应该是研究技术。或者有特别的用途。
作者:
lubaitq
时间:
2008-7-10 12:15
汇编只有写的人自己才看得懂。高手也许也看得懂吧。
作者:
ququbin
时间:
2008-7-10 14:30
并不是我非要发程序,是大家要求我发,不发恐怕要犯众怒
此程序就是视频中运行通过的
但是程序没有整理,有一部分无用的指令
本来我想跟大家讨论一下困难的模块,不可能把所有细节都说清楚
不是因为我藏私,因为没有时间和精力
弄清了原理,程序就是水到渠成
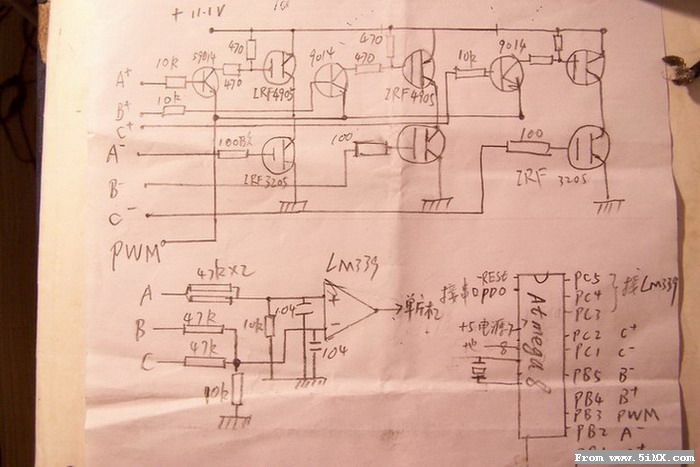
有朋友要原理图,我很愿意公开,但我不会用作图软件,
我慢慢把它分成几个模块,逐步贴出
作者:
flywolf
时间:
2008-7-10 16:43
这种帖一定要顶
作者:
cooleaf
时间:
2008-7-10 17:25
有没有电路图啊?
作者:
ququbin
时间:
2008-7-10 20:38
作者:
wxf999
时间:
2008-7-11 00:22
好东西一定要顶,支持楼主
作者:
fengjw
时间:
2008-10-15 16:34
好东西!顶:em24:
作者:
abc127
时间:
2008-10-15 20:08
顶一下!!!
作者:
guodongbubin
时间:
2008-10-16 11:12
标题:
没那保密的必要,学习中。。。
我是没有那方面的资料 ,只有些有刷车用电调的资料;硬件电路等。 无刷的少的可怜。
有要的朋友可以找我;
其实这市场: “ 黑” 的不见五指 ,亏的还是我们这些同胞啊 , 我是深有感触 。。。。:em17:
作者:
kenzhou
时间:
2008-10-16 21:52
:em26: :em26: :em26:
顶一个!
作者:
rita_xie2
时间:
2008-10-16 22:12
好贴
作者:
rita_xie2
时间:
2008-10-16 22:13
再问一下,那个LM339什么作用啊
作者:
yqyqingyv
时间:
2008-10-16 22:25
不错 有机会赶紧做
作者:
zhang56
时间:
2008-10-17 13:40
顶顶瓜,好。谢谢LZ
作者:
syp99
时间:
2008-10-22 08:54
网上都现成的,原理图,电路图,PCB,程序(.hex),电子元件!
作者:
wghgz
时间:
2008-10-24 00:39
楼主厉害,学习中
作者:
gale
时间:
2008-10-24 21:55
无论怎么说,能公开还是要顶滴!
作者:
chqok
时间:
2008-10-26 23:57
,学习中
作者:
yjt5188
时间:
2008-10-27 23:30
楼主辛苦了!!!:em26:
作者:
gzhuli
时间:
2008-10-28 01:25
原帖由
rita_xie2
于 2008-10-16 22:13 发表
再问一下,那个LM339什么作用啊
过零检测,用于判断转子相位。
作者:
梦幻铁甲
时间:
2008-10-28 15:59
我不懂
作者:
梦幻铁甲
时间:
2008-10-28 16:00
有点晕
作者:
cfwky
时间:
2008-11-1 20:20
好东西还是没找到!!!
顶了!
作者:
cpkf
时间:
2009-7-7 18:45
顶!等LZ接着讲.......
作者:
fan19800
时间:
2009-7-8 01:23
看不太懂啊~~~~
作者:
lin252931
时间:
2009-7-8 03:26
厉害啊,
作者:
老郑
时间:
2009-8-10 14:40
标题:
若有讲解 更好,让大家提高
作者:
weihb6
时间:
2009-8-10 21:26
学习中、、还看不懂那么深奥的东西
作者:
bobojust
时间:
2009-8-16 21:56
楼主的启动还需大大的改进...不知是否做了兼容性测试,带重负载启动等.:em04: :em24:
作者:
神圣军医
时间:
2009-8-16 22:03
汇编语言,单片机原理,很好很强大
作者:
SHUTTER
时间:
2009-8-17 00:04
居然是汇编写的程序 牛啊!
作者:
tianjinren
时间:
2009-8-17 11:31
虽然不懂,但支持这种精神。
作者:
cqmiao
时间:
2009-8-17 12:37
传汇编。。。换个人谁看得懂?还是C好。没什么意义,原理懂了自己写也不麻烦了。
作者:
桐木
时间:
2009-8-17 13:14
学习:em00:
作者:
tengda
时间:
2009-8-17 13:23
顶,让用得上的人用
作者:
空山无语
时间:
2009-8-18 10:49
我也顶一个,当初学程序,汇编就一直没有搞明白过,也不知考试怎么过。现在想起来都流汗!
作者:
weilaideayst
时间:
2009-8-21 12:26
好,学习了。
看来,玩模型的人都起码是大学毕业
作者:
xp642
时间:
2009-8-22 19:58
好贴,学习:em26:
作者:
tigerweijie
时间:
2009-8-23 08:35
这么好的事,怎么会有人反对?一定是厂家的人吧?
作者:
直600
时间:
2009-8-23 14:54
:em26:
作者:
举人
时间:
2009-9-14 22:38
不错。。。但是汇编看起太头痛! 赞个:em26:
作者:
binglin
时间:
2009-9-14 22:45
提示:
作者被禁止或删除 内容自动屏蔽
作者:
liwenmingzz
时间:
2009-9-21 23:25
提示:
作者被禁止或删除 内容自动屏蔽
作者:
爱撕鸡摸人
时间:
2009-9-24 12:11
用汇编写的人,现在已经不多了,解释部分相当不错!楼主是一个值得称赞的人!不过厂家的人就有点恨你了
作者:
hncszq
时间:
2009-9-24 12:34
:em15: :em24:
作者:
铜河
时间:
2009-9-24 14:07
LZ不错!
作者:
quyafeng
时间:
2009-9-24 22:24
都能像楼主, 中guo人就不会去仿德国人的四轴了! 中guo学术历来就有的悲哀! 有点点东西,始舍不得拿出来!:em15:
作者:
旺财的朋友
时间:
2009-10-1 07:55
又见汇编,我好喜欢啊
作者:
zhengque881002
时间:
2010-3-6 19:40
有没有四轴飞行器遥控器的程序公开一下啊。 新手求助。。。。 谢谢!!!
作者:
yi-min
时间:
2010-3-6 19:52
走自己的路 让别人去说吧 :em01:
作者:
xydhy5236
时间:
2010-3-12 09:34
:em26:
作者:
VTOL
时间:
2010-3-12 10:21
标题:
顶一下!
:em26: :em00: 第2步是步进加速LZ发去那里了?:em22:
作者:
shengchao26
时间:
2010-3-13 13:30
楼主慷慨,可是汇编不好看,最好有流程图。
另外,标准三段式起动好像不是很理想,建议楼主多想想改进的三段式。
同时,起动如何更快、起动方向如何不反向,都是比较难解决的。
有时间讨论讨论。
QQ:734752778.
我搞这个东东已经三载了,还是不很完善。
作者:
galang
时间:
2010-3-23 16:10
谢谢LZ
汇编很好看,但看不懂:em15:
要是C就好了!!!!:em15: :em15: :em26: :em26:
作者:
qdzhengtm
时间:
2010-4-3 20:38
一定要顶
作者:
TQCGP
时间:
2010-4-5 06:45
标题:
顶一个
作者:
flyingjb
时间:
2010-5-5 09:48
顶起来,喜欢汇编
作者:
传奇先生
时间:
2010-5-5 21:06
:em26:
作者:
九阳神功
时间:
2010-5-9 17:39
标题:
如看天书
作者:
直600
时间:
2010-6-27 22:18
谢谢楼主无私的精神
作者:
feilee
时间:
2010-6-28 13:12
够牛
作者:
smallrye
时间:
2010-7-9 16:42
收藏先
作者:
sexmo
时间:
2010-7-16 22:17
彙編啊,大大!還真沒幾個人能看得懂啊!
作者:
F1-ems
时间:
2010-7-18 11:22
学习了
作者:
我爱诗我爱雨
时间:
2010-7-18 23:47
t太厉害了,真想亲自去学习下
作者:
yzhllq
时间:
2010-7-19 08:25
有深度,很难。支持楼主,要大家都公开技术才能互补在难的东西也搞的定
作者:
soulhacker
时间:
2010-7-19 22:33
很好很强大
留个记号,慢慢学习
欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://5imx.com./)
Powered by Discuz! X3.3