原帖由 大番茄 于 2007-10-24 23:49 发表
QQ:157555624




原帖由 imzhoujian 于 2007-8-26 13:44 发表
:em15: :em15: :em15: 难咯!这年头的人哦!没创新思维哦!
不说别的,一个遥控器,智能控制的重中之重,永远盯着垃圾FF9或9X和以上级别的............:em17: :em17: :em17: :em17:
原帖由 Hyun 于 2007-8-26 13:55 发表
不错.祝你早日试成功!
提点建议:1.两根管用亚拓的是不是粗了点?(可以用细点的,减轻重量)
2.电调能不能只用两个(正,反转各一个)?
3.见过有个德国研究所的实物,可作参考.














原帖由 世外竹园 于 2007-8-30 16:08 发表
这东西没陀螺仪估计不行
原帖由 13914890939 于 2007-9-1 23:48 发表
请问楼主你以前是在杭州上学吗?说搞四浆飞行器家在宁波的吗?
原帖由 13914890939 于 2007-9-3 22:34 发表
因为我在杭州时也参考北航唐世明的四浆飞行器做过,用61级发动机,用天子直机尾浆传动系统,机械的比电动的要麻烦,花了几千块,后来联系到唐世明,他分配到中科院生理研究所了,他说当时他用学校经费花了近五万 ...




原帖由 13914890939 于 2007-9-7 22:59 发表
我也同问你没有舵机,陀螺仪执行什么动作。






原帖由 elmo 于 2007-9-10 15:49 发表
顶,本来我也打算做这东西的,不过是飞碟外形,用4无刷涵道,本来外壳和内部结构都做好了,后来算算花费高了主要是技术问题不好解决放弃了,祝你成功
原帖由 johnfen 于 2007-9-9 20:52 发表
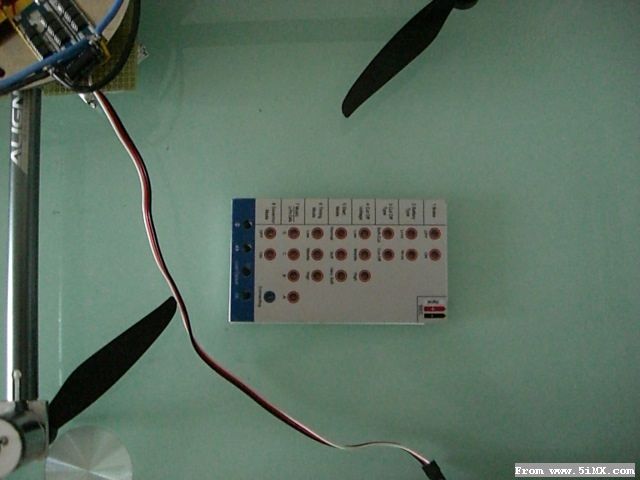
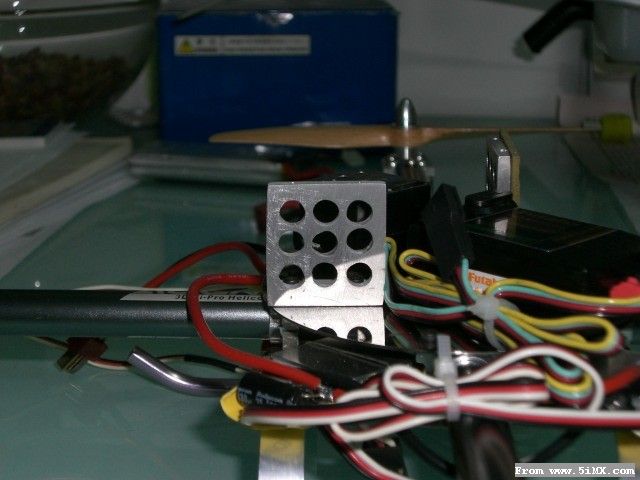
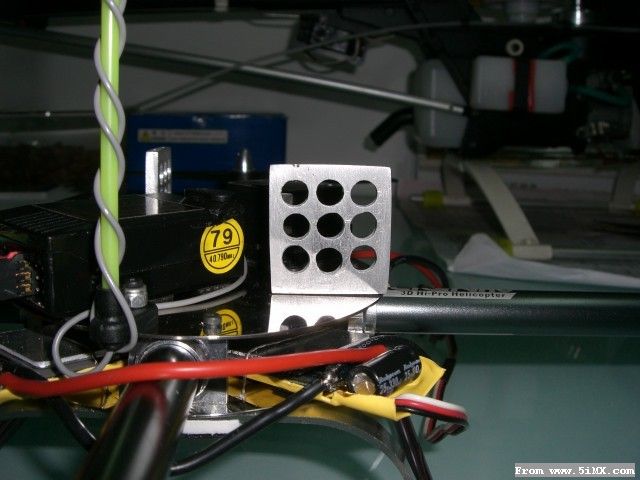
这是方向舵机安装座,准备用Hitec的HS-56HB高速舵机(我450电直的尾舵机),尺寸也是照这个舵机做的:
就靠它控制自旋,并实现原地转向功能了
http:/ ...
原帖由 smartcar 于 2007-9-10 17:20 发表
用空气舵控制自旋应该会比较简单.
原帖由 violit 于 2007-9-15 23:06 发表
其是最难的问题在于无刷电机控制的延迟~
意思就是说你现在发出的调整命令,可能半秒之后才执行,一秒之后才反映到转速上去~那么当你看到水平以后停止调整的时候,它却仍旧在执行刚才的命令~
于是飞行器过调 ...




原帖由 大番茄 于 2007-10-24 23:49 发表
QQ:157555624
原帖由 johnfen 于 2007-10-25 08:58 发表
不好意思,很多年未用QQ了,一直用MSN
原帖由 大番茄 于 2007-10-26 16:14 发表
刚注册了:fanjie0610@hotmail.com
原帖由 狐狸 于 2007-10-30 12:03 发表
ADXL202原网站公开价$8.50,折合成RMB约60元,可国内报价没有一家的零售价低于120元,俺去年想采购100只,呵呵,报价107元,俺气的!
原帖由 REDFOX119 于 2007-10-30 13:28 发表
绝对支持楼主~~~希望早日成功~~~有空可以交流一下~~~我们的已经试飞成功了~~~~
原帖由 RENAULT 于 2007-11-3 13:09 发表
呵呵,ls的,我也是跟着你的6脚机器人过来的。
你们都是高手啊,敬仰啊!
原帖由 electronicYH 于 2007-11-9 10:19 发表
... 我还没找到合适的角度传感芯片 ...

原帖由 ksh84222 于 2007-11-14 23:03 发表
看有的贴子说ENC-03温漂太大,要不要加温度补偿电路???


原帖由 electronicYH 于 2007-11-18 18:53 发表
http://photo.store.qq.com/http_imgload.cgi?/rurl2=63009509d74bad99b1a7a3b35d6bb5660d61cb86f3c6c0e7d662268aaaf2f49e7348814bc24e2b8bcaba1f10681057f965cc6833b69ea41af0ae1fb81ca3743cce0af10b1b1a3abe1 ...
原帖由 electronicYH 于 2007-11-19 22:08 发表
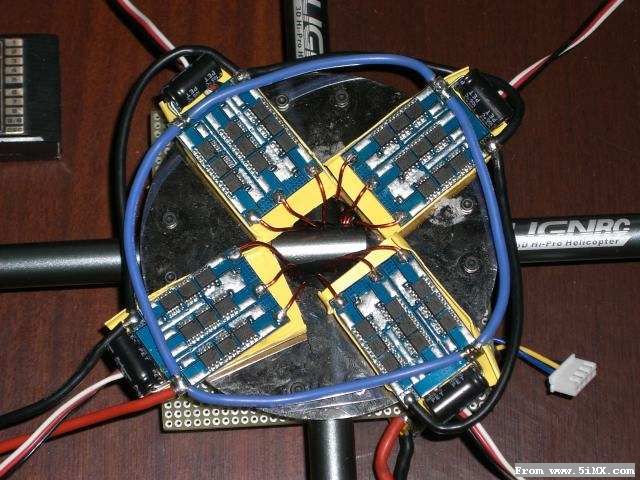
我的螺旋桨有两个是配套的,另外两个是买的一种四通的电直上的,型号不知道,比配套的浆要小一点,但效果还行。
并联在同一个动力接口的两个电机转速不同
是不是两个直流电机不能并联啊。
原帖由 hzqq99 于 2007-11-19 09:03 发表
这种小桨还是比较好买的,主要是大的反桨比较难买到。
ENC03我买的是100元左右,应该是买贵了,但为了早点体验到飞行的快乐,也就买了,估计今天会寄到杭州,还没问过。
另外看到航拍板块里有个加精的帖子(飞 ...
原帖由 ksh84222 于 2007-11-20 22:50 发表
就算ENC03是80元一个,三个也240啊,我认为还不如买个三维重力加速度计,这样用起也方便,还能计算出倾角,板子也好设计。
声明:我还没用过那个三维重力加速度计,只是看过资料,打算明年买!!!

| 欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://5imx.com./) | Powered by Discuz! X3.3 |
