5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
标题:
关于锁尾调节问题(抛砖帖)
[打印本页]
作者:
dondon7758521
时间:
2006-3-30 00:39
标题:
关于锁尾调节问题(抛砖帖)
综合论坛上大虾的意见,并与控制调节理论整合:
1)陀螺仪感度不足 --> 追尾发生(机尾逐渐移到设置点) --> 增益过小
2)陀螺仪感度过高 --> 摆荡发生(尾翼角位置来回摆荡) --> 增益过大,造成系统震荡
3)使用高速舵机 --> 急停急飞不甩尾 --> 频率响应好
所以,敝人推测:
1)尾翼面积加大 --> 出力增益加大 --> 可以弥补舵机速度不足(在扭力足够的情况下)与改善追尾现象
2)尾管与尾翼变轻 --> 转动惯量变小 --> 系统的频率响应变佳
3)尾翼距主轴远 --> 出力扭矩大 --> 系统增益变大,容易摆荡
详细情形可以看这本书”自动化技术中的进给电气传动, 机械工业出版社”
敝人只是机械工程师,不太懂控制调节理论?:em22:不知道大家有没有一些关于直机锁尾的经验,大家一起来讨论一下。:em21:
作者:
jackyzh
时间:
2006-3-30 02:42
感度不足的后果应该是陀螺仪失效,而不是追尾。
作者:
dondon7758521
时间:
2006-3-30 07:06
原帖由
jackyzh
于 2006-3-30 02:42 发表
感度不足的后果应该是陀螺仪失效,而不是追尾。
感谢版主大大呀!:em21:略作修正一下…:em06:
1)陀螺仪感度不足--> 陀螺仪失效(尾翼未移动至设置攻角而机体自转) --> 增益过小,使稳态值与预定值(平衡位置)产生差异
作者:
palm
时间:
2006-3-30 09:40
................
作者:
dondon7758521
时间:
2006-4-8 23:35
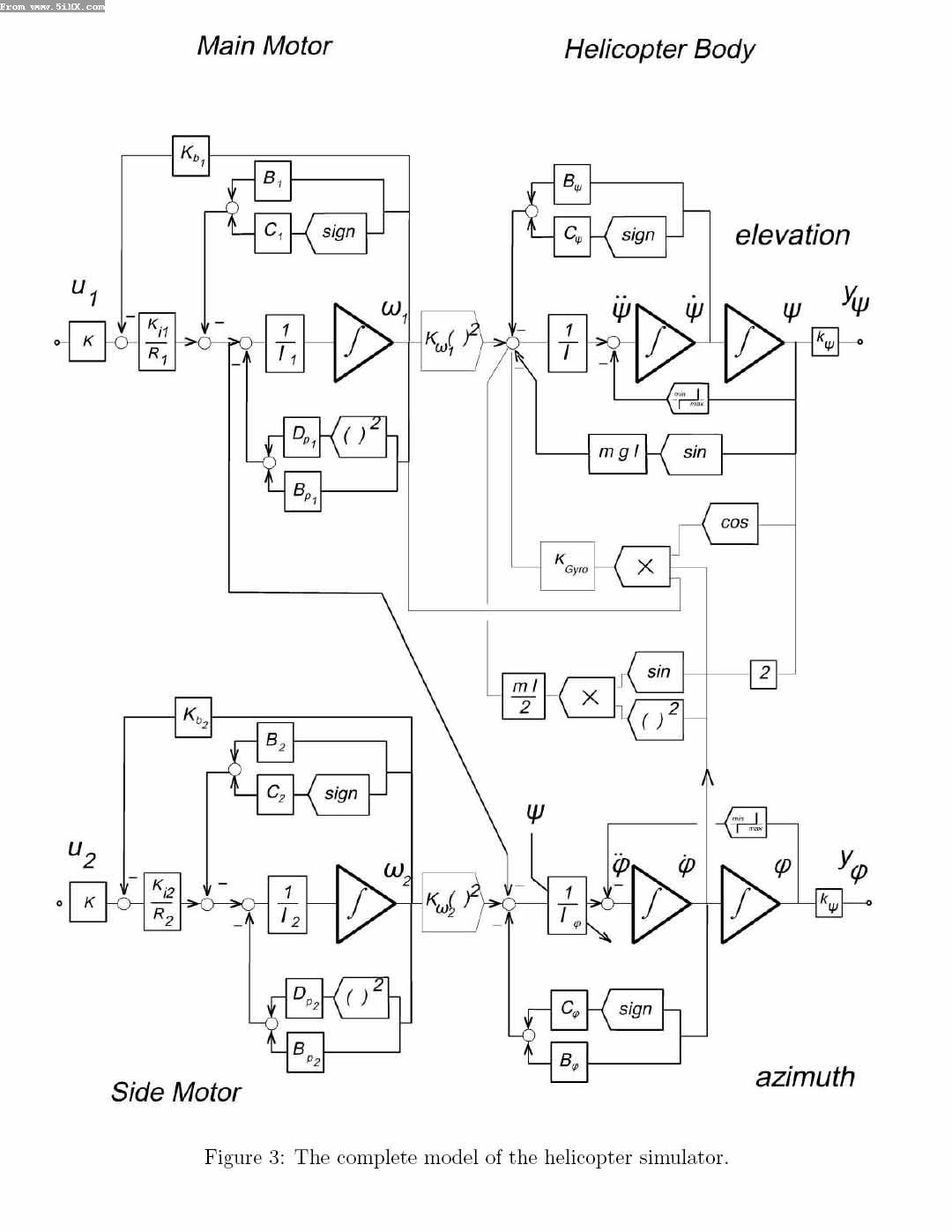
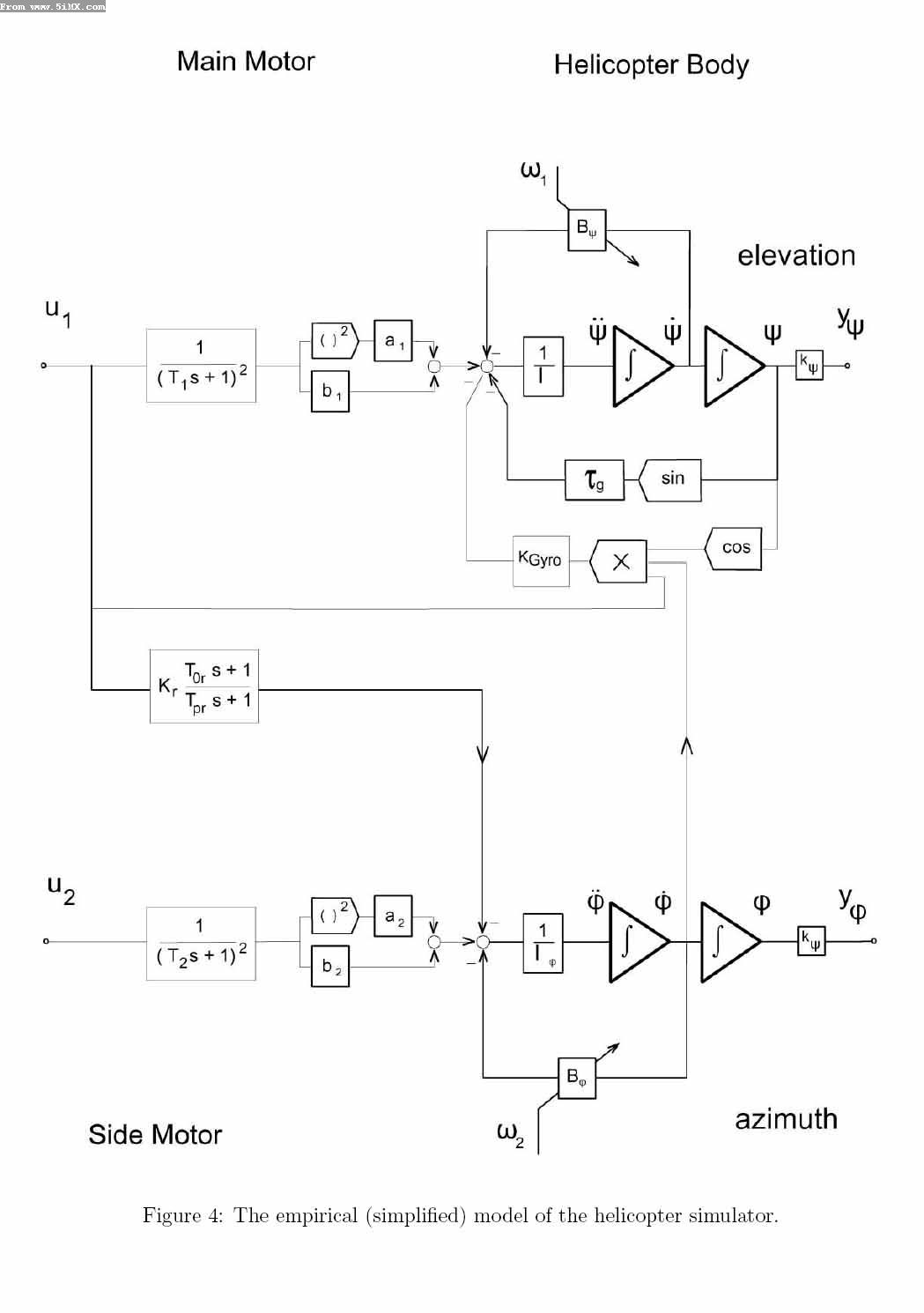
:em25:呜…没有意见吗?我是看这个传递函数有感而发。
欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://5imx.com./)
Powered by Discuz! X3.3